V
主页
斯坦福大学造了一台巨型柔性机器人,还能随意变形—古月居搬运
发布人
IEEE Spectrum 斯坦福大学的研究人员已经研发出了一款新型的(主体为)柔性机器人,该机器人由一套顺应性的充气管组成。它的大小接近人类身高,可以自由移动并且不需要泵或者缆绳,同时它的安全性与大型机器人差不多,甚至还会打一点篮球。
打开封面
下载高清视频
观看高清视频
视频下载器
前沿 | MIT教机器人捏橡皮泥?
【古月居测评】六轴协作机械臂-小象机械臂myCobot深度测评
【公开课】 古月• 第三讲《TogetherROS移动机器人驱动开发》 | 智能小车| SLAM地图构建| ROS2
【机器人&ROS】古月居访谈 —— 擎朗机器人 · 李通
前沿|未来的自重构机器人
日本正在建造一台可以行走的巨型高达机器人
【公开课】 古月• 第五讲《TogetherROS移动机器人SLAM地图构建》 | 智能小车| SLAM地图构建| ROS2
测评|桌面级移动抓取机器人Transbot,跟着古月居一探究竟
前沿| 可进行自我形态的全身视觉建模机器人
前沿| 牛津大学在机器人骨架上训练人类肌肉
前沿|一个电机和机翼就能做无人机?
【公开课】 古月• 第二讲《TogetherROS移动机器人系统设计》 | 智能小车| SLAM地图构建| ROS2
前沿|第一个具有机载感知能力和和操纵能力的扑翼机器人
NVIDIA的研究表明:抓取动作分类系统可以提升机器人的人机递接能力
关于手内操作的Roller Grasper V2的设计与控制
前沿| 受千足虫启发的多节机器人,可轻松穿越3D地形
前沿|执行能力相当于3岁孩子的机器人—AI agent
前沿| 加利福尼亚大学研发出柔性可发光材料,探索未知环境的软体机器人福音!
【公开课】 古月• 第四讲《TogetherROS移动机器人视觉应用》 | 智能小车| SLAM地图构建| ROS2
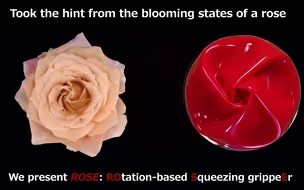
前沿|ROSE—酷似玫瑰的新型柔性抓取器
灵光一刻 | 打破信息孤岛!空地协同一体化机器人自主行进系统
前沿| Ammeca机器人连接GPT 3,回复变得有意义
【天之博特&古月居】翻车王老师采访-ICRA RoboMaster机甲大师高校人工智能挑战赛
OriginBot智能机器人开源套件功能演示
前沿| 机器人擦桌子,真的比人类强吗?
前沿| 波士顿动力机器狗巴黎时装周首秀,大秀舞技的同时还帮模特脱衣服?
《一分钟教你如何玩转ROSCon China 2024》
AI开发,何必从零开始?地平线旭日X3派开发板-更强的算力国产树莓派替代
前沿|无人机羽毛球——低视力人群运动的福音
前沿| 开源双足机器人BRUCE,用于研究和教育的仿人机器人
前沿|类人机器人Phoenix,用手打开塑封袋
前沿|加州大学最新成果!类鸟机器人 BirdBot,四分之一的能量可达55公里/小时
【西北工业大学站】古月居校园行之“四大天王”【滑稽狗头】
前沿|用于柔性机器人分布式控制的非线性充气执行器
前沿| MIT具有集成传感功能的可穿戴辅助机器人
前沿|最简单的猴子摆机器人
【古月居】ROS机械臂开发原理
前沿|创意机器人——通过膨胀或收缩车轮主动改变形状
前沿| 看看有史以来最美味的机器人
前沿| 自动驾驶自行车存在哪些挑战?