V
主页
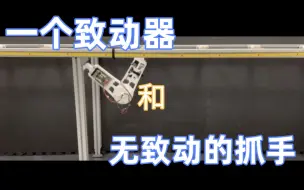
前沿|用于柔性机器人分布式控制的非线性充气执行器
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
有机器人就是方便
前沿|最简单的猴子摆机器人
《ROS2 Qt21天训练营第17期》| 人机交互 | ROS | 激光点云 | 导航路径【课程试看】
OriginBot智能小车完整安装演示
【公开课】古月精讲 · ROS移动机器人实战 | ROS入门必看!
OriginBot智能机器人开源套件功能演示
【开源项目】低成本开源四足机器人
【公开课】 古月• 第五讲《TogetherROS移动机器人SLAM地图构建》 | 智能小车| SLAM地图构建| ROS2
MuJoCo机器人阻抗控制仿真【课程试看】
基于深度学习的机器人平面抓取【课程试看】
【公开课】 古月• 第三讲《TogetherROS移动机器人驱动开发》 | 智能小车| SLAM地图构建| ROS2
前沿|未来的自重构机器人
MuJoCo机器人强化学习仿真入门|从零开始的MuJoCo世界生活之强化学习篇【课程试看】
3、4自由度机械臂正逆解推导与代码实现 【课程试看】
【直播回放】ROS2 技术点及分布式开发——第十九届智能车竞赛:地平线智慧医疗智能车创意组
前沿|类人机器人Phoenix,用手打开塑封袋
前沿| 蓖麻油,让软体机器人获得自愈功能!
OriginCar智能机器人套件资料使用指南
【直播回放】2023年全国大学生物联网设计竞赛—地平线智能创意组备赛解读
前沿| 受千足虫启发的多节机器人,可轻松穿越3D地形
前沿|通过折纸艺术改变形态的微型飞行器
前沿|无人机羽毛球——低视力人群运动的福音
前沿| Ammeca机器人连接GPT 3,回复变得有意义
灵光一刻 | 打破信息孤岛!空地协同一体化机器人自主行进系统
前沿|移动机械臂 送水不洒的同时还能躲避球
前沿| 牛津大学在机器人骨架上训练人类肌肉
前沿 | MIT教机器人捏橡皮泥?
PID参数整定与模糊自适应PID【课程试看】
《多刚体系统动力学建模及MATLAB仿真》|MATLAB|机械臂|仿真测试|控制算法开发【课程试看】
前沿| 华盛顿大学开发出定制抓手,帮助机器人拿起几乎任何东西
《ROS自动驾驶障碍物检测》| 激光雷达 | 数据集 | 算法优化 | 3D视觉【课程试看】
《面阵激光雷达SLAM》| C++| livox-loam、fastlio、r3live【课程试看】
前沿| 机器人擦桌子,真的比人类强吗?
移动机器人目标检测YOLOv5【课程试看】
前沿| Flexiv祝世界鸡尾酒日快乐!
【2.TogetherROS系统安装与配置】基于ROS2 | 更强的AI能力 | 开源系统
前沿|长指甲的机器人—Sanctuary
【直播回放】2023 ROS暑期学校29号直播精剪
【直播回放】AI时代智能机器人开发新范式
【直播回放】第5期|开源项目机器狗训练营——总结机器狗关键点