V
主页
自动驾驶规控学习之--OpenPlanner-停障等功能演示
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
ROS-Carla泊车停车场联合仿真过程步骤讲解
自动驾驶路径规划-Lanelet教程
自动驾驶路径规划算法入门-autoware的实战使用
Frenet坐标系双t规划算法的代码原理讲解(一)
自动驾驶carla ros仿真Apollo移植算法调试
carla交叉口动态避障
自动驾驶规划控制之autoware-carla联合仿真open planner停障功能
自动驾驶决策规划论文交流(三)自动驾驶端到端论文
深度强化学习算法carla平台实战-PPO算法
自动驾驶深度强化学习DRL-遮挡探头场景demo 训练全过程
Autoware.ai-carla联合仿真、泊车场景-dl-iaps优化、ros-carla泊车停车场联合仿演示
985博士带你玩转自动驾驶决策-carla等平台强化学习效果演示
自动驾驶学习决策-carla仿真轨迹预测演示
自动驾驶决策规划实战-ros-carla停车场场景搭建与规划研究
轻松上岸carla-ros联合仿真-carla环境配置与运行
轻松搞定强化学习--注意力机制的代码应用实战(下)
被PPO算法惊艳到了--自动驾驶强化学习决策规划工程-PPO算法实战
深度强化学习Carla实战-SAC算法(二)--SAC-Carla训练过程
自动驾驶路径规划ros移植-Autoware.ai-carla联合仿真
从零入门决策规划-手撕frenet规划算法(二)
OpenCDA框架效果演示
自动驾驶路径规划ros-carla联合仿真使用
自动驾驶深度强化学习-前言课
自动驾驶强化学习决策规划carla实战-ddqn算法
从零入门决策规划-手撕frenet规划算法(一)
自动驾驶路径规划算法入门-autoware的实战使用
carla-autoware联合仿真-open planer避障教程三
11.11直播回放-DWA算法改进点
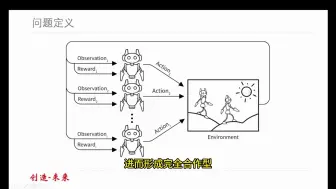
自动驾驶多智能体深度强化学习-入门知识
自动驾驶路径规划实车工程参数简介
自动驾驶路径规划-控制决策入门学习
自动驾驶路径规划-控制决策入门学习
深度学习-强化学习必备实战经验-注意力机制的代码应用实战(上)
自动驾驶深度强化学习-HighwayEnv安装使用
自动驾驶路径规划算法入门-autoware的实战使用
从零入门决策规划-手撕frenet规划算法(三)
自动驾驶路径规划算法入门-Autoware.ai-carla联合仿真使用介绍
自动驾驶规划控制之autoware-carla联合仿真open planner停障功能
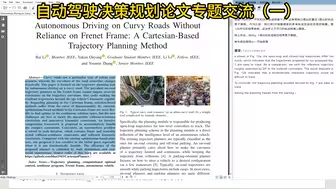
自动驾驶决策规划论文专题交流(一)
自动驾驶路径规划-控制决策入门学习