V
主页
自动驾驶规划算法入门实战学习-teb规划算法的应用
发布人
系统入门自动驾驶规划算法系列之-teb规划算法的应用 如需了解更多详情和咨询工程代码可添加小助手微信咨询
打开封面
下载高清视频
观看高清视频
视频下载器
11.11直播回放-DWA算法基本思想分享
自动驾驶规划控制算法工程更新简介
自动驾驶决策规划入门实战-DWA开放空间算法
自动驾驶强化学习决策规划carla实战-ddqn算法
自动驾驶路径规划入门-JOSM的使用
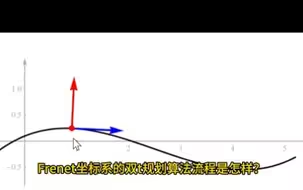
Frenet坐标系双t规划算法的代码原理讲解(二)
自动驾驶路径规划-控制决策入门学习-变道规划算法效果演示
carla-autoware联合仿真-open planer避障教程三
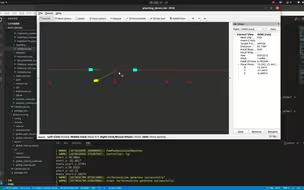
自动驾驶路径规划-控制决策入门学习
自动驾驶决策规划论文专题交流(二):Motion Planning for Autonomous Driving
自动驾驶路径规划-控制决策入门学习
自动驾驶深度强化学习-前言课
自动驾驶决策规划论文交流(三)自动驾驶端到端论文
自动驾驶路径规划-控制决策入门学习
自动驾驶决策规划论文专题交流(一)
自动驾驶路径规划-控制决策入门学习
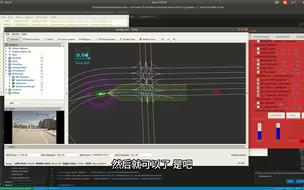
自动驾驶路径规划算法入门-autoware的实战使用
231230直播回放:自动驾驶qp二次优化实例讲解
自动驾驶路径规划算法入门-Autoware.ai-carla联合仿真使用介绍
自动驾驶决策规划学习之ros2-carla0.9.13联合仿真lattice避障示例
自动驾驶深度强化学习-HighwayEnv安装使用
ROS-Carla泊车停车场联合仿真过程步骤讲解
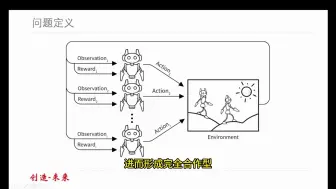
自动驾驶多智能体深度强化学习-入门知识
自动驾驶决策规划学习之ros2-carla0.9.13联合仿真lattcie导航示例
Autoware.ai-carla联合仿真、泊车场景-dl-iaps优化、ros-carla泊车停车场联合仿真演示
自动驾驶路径规划-控制决策入门学习
深度强化学习算法carla平台实战-PPO算法
carla-autoware联合仿真-open planer避障教程二
自动驾驶路径规划算法入门-autoware的实战使用
985博士带你玩转自动驾驶决策-carla等平台强化学习效果演示
自动驾驶规划控制之autoware-carla联合仿真open planner停障功能
自动驾驶学习决策-carla仿真轨迹预测演示
carla-autoware联合仿真-open planer避障教程一
11.11直播回放-DWA算法改进点
自动驾驶路径规划ros-carla联合仿真使用
自动驾驶路径规划-控制决策入门学习
自动驾驶路径规划ros移植-Autoware.ai-carla联合仿真
从零入门决策规划-手撕frenet规划算法(二)
自动驾驶路径规划实车工程参数简介
自动驾驶路径规划控制-停车场泊车模拟场景