V
主页
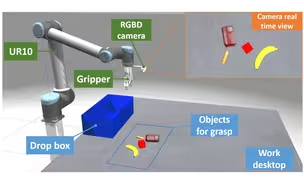
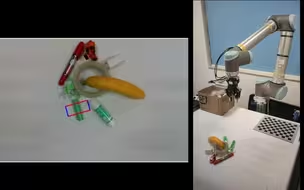
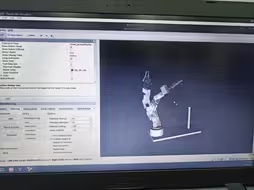
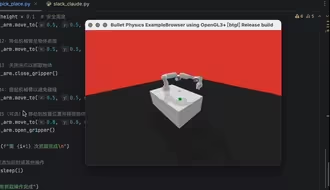
Gazebo中UR5机械臂视觉抓取任务仿真
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
仿真环境下 机械臂Grasp Pose Detection (GPD)论文复现
基于ROS搭建仿真环境——A ROS based Open Source Simulation Environment
宇树K1机械臂的视觉抓取仿真
基于yolo和moveit的图像识别机械臂目标抓取搬移
Gazebo中ur5机械臂仿真汉诺塔
真实机械臂平面抓取
基于ROS双臂协同的智能物流搬运系统
UR机械臂视觉抓取演示demo
基于ros路径规划+避障演示
使用yolov8识别+深度相机+机械臂实现垃圾分拣机械臂
人形机器人远程视觉操纵 论文和代码在简介
机器狗与机械臂抓取调试中
基于stm32和ros串口通信,利用moveit进行路径规划,将轨迹送给stm32执行,带动机械臂运动
ROS机器人自动驾驶,自主导航巡检车可作为高校车辆工程、智慧交通、自动化等多专业的实践教学工具
【产品升级】搭载自研驱控一体电机,并联机械臂结构!轮趣发布全新ROS科研机器人带机械臂版
(代码很简洁)用Claude简简单单控制一个机械臂
调车总不能炸机了吧(●'◡'●)
[ ETH RSL ] mANYpulator – 移动操纵 (Martin Wermelinger)
自制SCARA四轴机械臂,低成本3D打印,全闭环控制
Science Robotics | 无需外部传感器,通过关节力矩传感技术即可实现"触摸即命令"
机械臂关节空间轨迹规划【笛卡尔空间+混合多项式+五次多项式】
3D视觉引导高强螺栓无序抓取
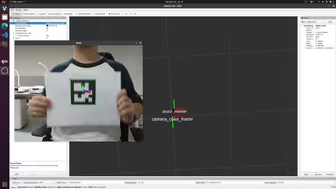
【考核用】调用opencv识别aruco码,在ros中更新tf
路径平滑|基于共轭梯度法的轨迹优化(ROS C++/Python)
OpenAI 深夜发布最新大模型 o1 宣传片合集(AI 精翻)
人形机器人腿部结构 基于 4DoF 球面并联机构
猜猜这个铁块机器人用来干嘛的?#机器人应用
我在用低代码玩机械臂
【CoRL 2023 Best Student Paper Finalist 论文讲解】机器人学习存放物品
稚晖君Dummy复刻换上钢板,机械臂终于有了她该有的样子,前前后后一顿折腾,有了更多扩展的可能
自制ros建图导航机器人2
使用相机在ROS下的TensorRT量化推理yolo模型以及使用BYTEtrack算法进行目标跟踪部分的更新
PiPER:仅售 2,499 美元 AgileX 的下一代轻型机械臂!
【franka-遥操作】完结。遥操作旋转处理好啦,用的四元数。下面开始考虑具身智能方案,有一起研究的欢迎来讨论。
智能轻型机械臂支持多种移动平台、处理器、传感器和执行器的融合应用,用户可以根 据需求自由组合与搭配
simulink演示(4)-fuzzy工具箱
【人形机器人】在Gazebo/Mujoco中的仿真
1分钟给你讲明白U-MOCO全系列机械臂!
[厉不厉害你机哥]ROBOCUP-国一客户案例-移动靶投放-Phoenix330科研竞赛无人机
突发!OpenAI震撼发布最强模型o1!推理能力超人类博士??