V
主页
京东 11.11 红包
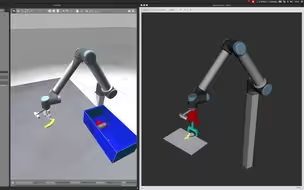
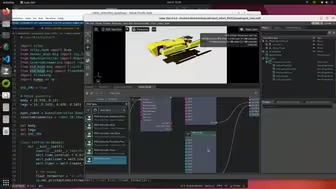
Gazebo中ur5机械臂仿真汉诺塔
发布人
在Gazebo下搭的这个仿真环境。用的是UR5机械臂。一开始圆盘叠在一起会异常抖动,后来把惯性矩阵改打了就好了很多。难顶
打开封面
下载高清视频
观看高清视频
视频下载器
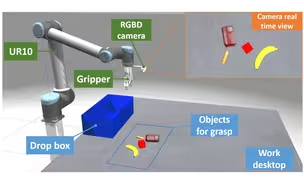
基于ROS搭建仿真环境——A ROS based Open Source Simulation Environment
仿真环境中进行机械臂抓取
【开源教程】ROS+PX4开源机械臂控制(上)
听劝不要轻易入坑SLAM
有电脑就行!三分钟安装 openEuler 操作系统并搭建ROS环境
赛博朋克东南大学?“CYBATHLON2024”半机械人仿生奥运会夺冠!全程回顾
《ROS 2机器人开发从入门到实践》6.4.1安装与使用Gazebo构建世界
学习小记:如何解决Rviz和Gazebo中机器人运动不同步的问题(Rviz中机器人固定不动的问题)
无人驾驶CAN通信快速入门:部署、测试,全过程精细讲解(主讲录制人:严正清;技术小组:小组:陈云、贾岚博、刘志强、张连会)
《ROS 2机器人开发从入门到实践》6.4.2在Gazebo中加载机器人模型
《ROS 2机器人开发从入门到实践》6.5.2使用 Gazebo 接入 ros2_control
《ROS 2机器人开发从入门到实践》6.4.3 使用Gazebo标签扩展URDF
使用 Isaac Sim 和 Isaac ROS 实现 AMR 视觉导航
fluent计算对流传热系数
abaqus断裂裂纹仿真
ROS2GO CUDA:开启 AI 与机器人开发的新纪元
【VREP】三机协作简单版
NVIDIA Isaac ROS 3.0:重塑机器人未来
《ROS 2机器人开发从入门到实践》6.5.1ros2_control介绍与安装
《ROS 2机器人开发从入门到实践》7.1 机器人导航介绍
使用Isaac Sim和ROS2控制机器狗指南
马里奥麦克纳姆轮小车及其室内视觉定位 【AI配音】
用PSIM做的LLC仿真,参考意义大吗
《ROS 2机器人开发从入门到实践》6.4.4 使用两轮差速插件控制机器人
Ansys把大模型GPT和自家的产品结合了,已发布AnsysGPT
使用MATLAB和牛顿迭代法计算学习通实验案例四(非线性方程)第二题
机械手爬行
特斯拉新发布的机器人已经有点那啥了‼️
《ROS 2机器人开发从入门到实践》6.3.2为机器人部件添加质量与惯性
ros教程(6)
深度视觉,三维感知!全新3D深度视觉机械臂闪亮登场,空间抓取、体积测算统统不在话下!
Flac3D边坡降雨流固耦合,渗流饱和度孔隙水压力,渗流箭头清晰明了。
学长说:有佬的帮助就是不一样!!!
【开源教程】ROS基础例程详解
《ROS 2机器人开发从入门到实践》6.5.3使用关节状态发布控制器
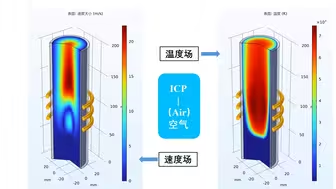
ICP电感耦合等离子体炬-仿真记录
fluent多孔介质模型
机器人移动底盘
首发——轮腿机器人仿真(结束)
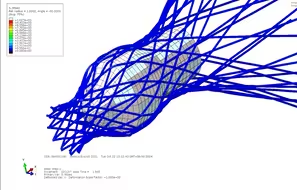
ABAQUS旋转编织仿真