V
主页
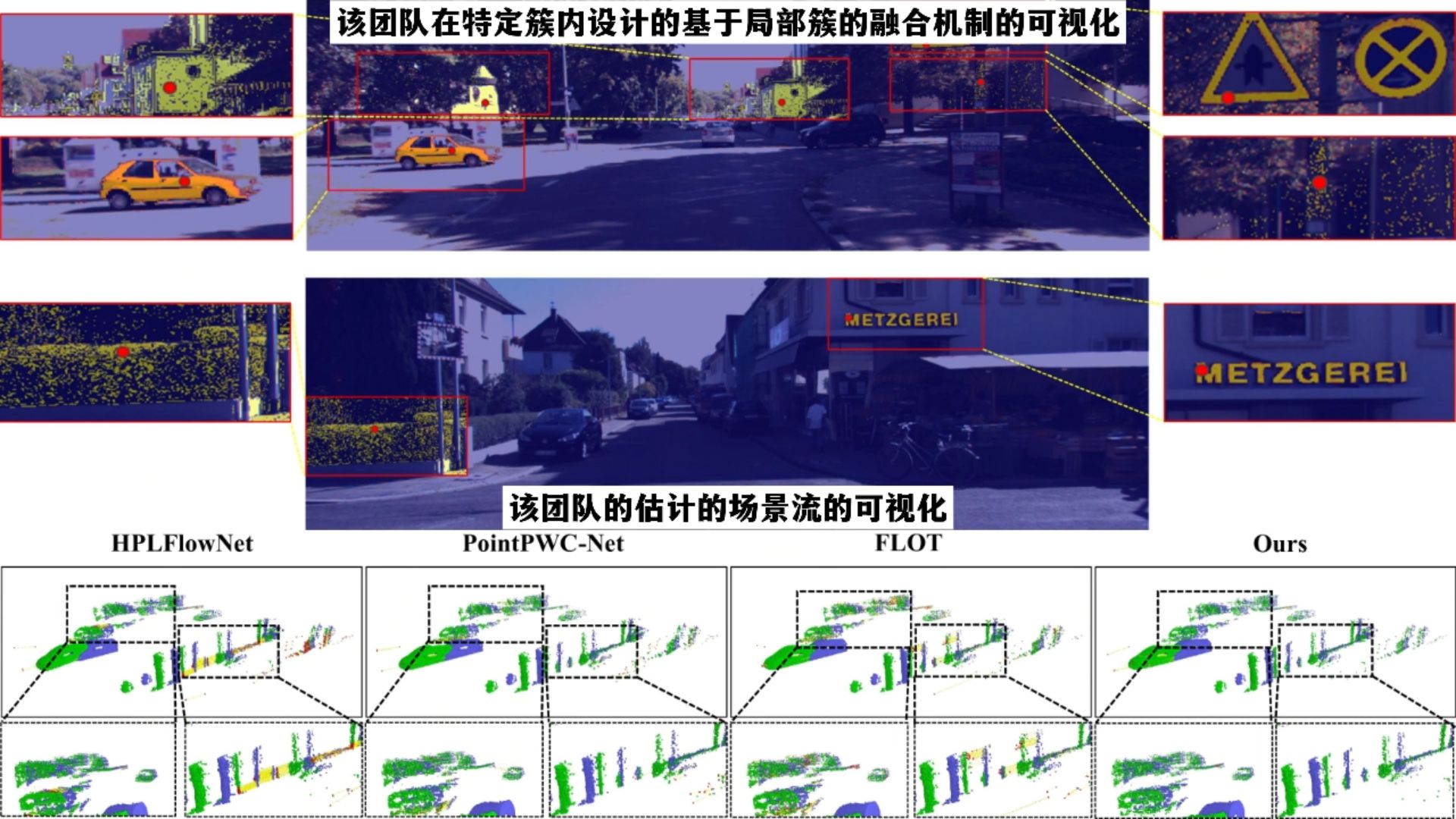
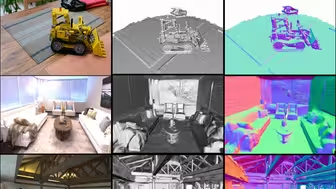
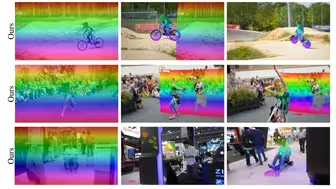
ECCV'24 oral | DVLO,首个基于深度聚类的多模态融合,双向结构对齐的融合网络新SOTA
发布人
该论文提出了一种具有双向结构对齐的新型局部到全局融合网络,用于视觉激光雷达里程计。基于聚类的局部融合模块旨在提供细粒度的多模态特征交换。此外,还设计了自适应全局融合以实现全局信息交互。综合实验表明,该团队的DVLO在准确性和效率方面都达到了最先进的性能。该团队的融合模块还可以作为一种相当通用的融合策略,可以很好地推广到多模态场景流估计任务。该团队将在更多多模态任务上进行泛化实验,留待将来研究。 标题:DVLO: Deep Visual-LiDAR Odometry with Local-to-Global Feature Fusion and Bi-Directional Structure Alignment 链接:https://arxiv.org/html/2403.18274v3
打开封面
下载高清视频
观看高清视频
视频下载器
ECCV'24 Oral 满分论文 | SpikeYOLO:脉冲神经网络新进展,引领高能低耗目标检测新纪元
SIGGRAPH 2024 | 上科大开源2DGS!几何精度降维打击3DGS!
超越BEVFusion!GraphBEV:解决多模态特征不对齐和噪声问题,助力量产
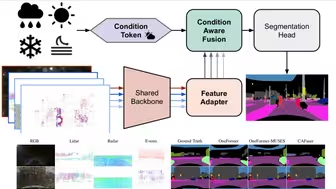
ETH新作CAFuser:条件 感知多模态融合 ,实现对 驾驶场景的稳健语义感知,多个下游任务SOTA!
大疆 CVPR 2024 | AFNet自动驾驶中单视图和多视图深度的自适应融合
自动驾驶主流感知范式:BEV
能有多牛被300多万人浏览的我问题”对于神经网络,硕士博士不需要弄明白原理,只需要应用,是这样吗?“
神经网络杀疯了,登上nature:35年首次被证明具有泛化能力,能像人类一样思考!人工智能/机器学习/神经网络/深度学习/计算机视觉
深度学习环境配置一套搞定:anaconda+pytorch+pycharm+cuda全详解,带你从0配置环境到跑通代码!
CVPR 2024 | VastGaussian:首个基于3D GS的大场景高质量重建和实时渲染方法,出自清华大学、华为诺亚方舟实验室、中国科学院
今晚直播预告:ICCV 2023 | SurroundOcc:环视三维占据栅格新SOTA! 韦祎,清华大学博士
美团 | FocusBEV:自标定与时间融合策略提升单目BEV分割性能
广汽冯兴亚谈传统车企出卖灵魂论:自动驾驶技术现在已不是灵魂
keras之父从谷歌离职 tensorflow彻底败给了pytorch
ECCV'2024 北航、极氪领衔 | FSD-BEV:大幅度提升基于视觉的3D目标检测算法性能,实现感知新SOTA!
SIGGRAPH'24 | 逆天!利用分层3D高斯表示,实时渲染超大规模场景!
ECCV 2024 代码开源 | HTCL:分层时间上下文,超过LiDAR,问鼎OCC,霸榜所有视觉方案
赵行团队新作 | 通过专家混合 模型提升自动驾驶运动规划器的 泛化能力,实现性能新SOTA
ECCV'24 开源 | 6DGS 又快又好,无需迭代的 单图像6D物体位姿估计
清华叉院、理想提出DriveVLM,视觉大语言模型与自动驾驶融合,以提升自动驾驶能力
小米SU7女车主福利,倒车入库一把就进,雷总直播展示倒库能力,障碍物提醒功能备受好评
直接抄她的代码,就是最好的学习方法!!
来自中国科学院自动化所的团队,首次提出了一种名为 Drive-WM的全新多视图世界模型
nuPlan:世界上首个现实世界自动驾驶数据集和基准,旨在测试基于机器学习的规划器处理各种驾驶场景以及做出安全且高效决策的能力
真的超容易“搞深度学习神经网络到底怎么改代码的啊?”复旦博士教我用一本书搞定!
浙大、上海人工智能实验室等即将开源PGSR: 平面3DGS提升表面几何,超越 2DGS、GOF,实现渲染新高度
纯视觉已经「过于优秀」,为何华为智驾仍坚持用激光雷达?
ECCV'24开源 | LocoTrack: 塑造SLAM新纪元!6倍加速! 跟踪一切最新SOTA!
对于卷积神经网络,硕士博士不需要弄明白原理只需要应用,是这样吗?
ECCV'24 | OpenIns3D:无需2D图像的3D场景理解技术,随意处理复杂推理和文本查询
研一刚入学,从未接触过神经网络python也是才开始学,现在导师要我做LSTM,我应该去学什么?
【模型API】DeepSeek发布R1 Lite,超越OpenAI引热议
综述:自动驾驶的多智能体强化学习,旨在帮助研究人员整合多智能体强化学习技术
重新定义自动驾驶的动态视觉?谷歌提出几何优先的动态场景方法MonST3R
小鹏网约车,不敢用智驾?
【全200集】最适合新手的机器学习入门教程!回归算法、聚类算法、决策树、随机森林、神经网络、贝叶斯算法、支持向量机等十五大机器学习算法一口气学完!
喜报•我方电赛&robocup&江苏省机器人大赛无人机定位精度已达1cm!!!(多日不见,水个视频)
小波变换+CNN完美融合,最新idea发了CV顶会!这思路简直绝了!
基于NVIDIA Isaac Sim和LIO-SAM的激光SLAM demo
ECCV'24 | 从BEV到OSP:自动驾驶场景建模新趋势,提供更灵活精确的空间预测