V
主页
京东 11.11 红包
ECCV'24开源 | LocoTrack: 塑造SLAM新纪元!6倍加速! 跟踪一切最新SOTA!
发布人
该团队引入的LocoTrack是一种针对点跟踪任务的方法,旨在解决现有方法仅依赖局部二维相关性的不足。我们的核心创新在于局部全对对应关系的表述,通过限制搜索范围将四维相关性的丰富空间上下文与计算效率相结合。 标题:Local All-Pair Correspondence for Point Tracking 链接:https://ku-cvlab.github.io/locotrack/
打开封面
下载高清视频
观看高清视频
视频下载器
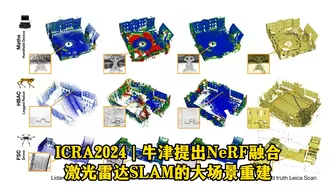
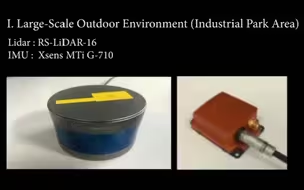
ICRA | 2024:牛津大学针对NeRF和激光雷达的缺点,提出了NeRF融合激光雷达SLAM的大场景重建系统
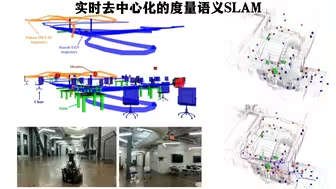
异构机器人无GPS协作!宾大重磅推出SlideSLAM:实时去中心化的度量语义SLAM
ICRA 2024 最佳学生论文奖 | NoMaD:基于Transformer用于 导航和探索的目标掩蔽扩散策略
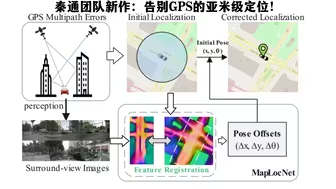
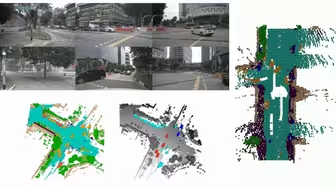
IROS24新作 | 上交大秦通团队,MapLocNet:实现自动驾驶新突破 告别GPS的亚米级定位!
关于3D Gaussian Splatting SLAM的又一最新开源力作推出,LIV GaussMap:用于实时3D辐射场地图渲染的激光雷达、惯性、视觉融
ECCV'24 | 从BEV到OSP:自动驾驶场景建模新趋势,提供更灵活精确的空间预测
NTU开源 | AirSLAM:高效且 光照稳健的点线视觉SLAM系统 嵌入式运行速度可达40HZ
清华&地平线最新开源!全任务SOTA!SparseDrive:端到端自动驾驶新范式!
Science Robotics | 无需外部传感器,通过关节力矩传感技术即可实现"触摸即命令"
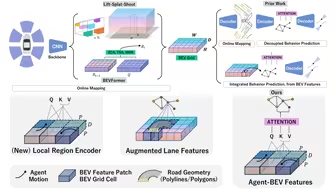
ECCV'24 | "突破传统",通过直接BEV特征注意力加速在线建图和行为预测
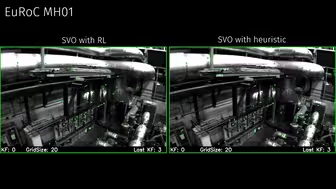
强化学习给视觉里程计自适应调参
浙大、上海人工智能实验室等即将开源PGSR: 平面3DGS提升表面几何,超越 2DGS、GOF,实现渲染新高度
【已开源】秦通课题组新作入选IROS24!开启实车端到端泊车革命!
ECCV'24 最新Oral已开源 ! | 用于 3D大场景生成的金字塔扩散模型,实现无限场景生成与高效数据迁移
铰接式车辆的运动规划
超越BEVFusion!DifFUSER:扩散模型杀入自动驾驶多任务(BEV分割+检测双SOTA)
NeurlPS'24 开源 | DC-Gaussian,基于3DGS的行车记录仪视频场景重建,有效去除反射遮挡
MOT-CUP: 具有共形不确定性传播的 协同多目标跟踪,利用来自COD的不确定性量化以增强MOT性能
ECCV '24 CVPPA | KAN你能看见吗? KAN网络与 Sentinel卫星结合实现 高效且可解释的作物田地分割
机器人顶级期刊T R O创刊至今首篇全华班Best paper诞生。一种利用分布式无人机机队进行快速协作探索的方法RACER获得Best paper。
CVPR 2024 | LiDAR Diffusion 首个可以根据多模态条件生成逼真 的激光雷达场景方法,加速107倍
AR光波导的应用与发展 | 郑昱
NeurlPS'24开源 | GaussianCube 一种用于三维生成建模的结构化和 显式辐射表示,引领三维重建新范式
最新开源:端到端6D物体姿态跟踪,无需标注数据集!
RSS'2024 | MPCC++:升级无人驾驶安全盾牌,首次在现实中达到100%防撞率
ICRA2020 | 多传感器融合实现点云地图构建 R-LINS
Cam4DOcc: 面向自动驾驶的视觉4D占用预测新基准,代码已开源,欢迎来拍砖
ECCV'24 | JHU提出无需SfM的X光3DGS技术: X-Gaussian,使得X射线新视图合成推理速度提升73倍!
Nature | 颠覆传统设计!电动液压肌肉骨骼机器人腿,实现真正意义上的灵活、强适应性的且节能运动!
扔掉手柄!Facebook手部跟踪技术结合VR头盔,手势动作完美重现
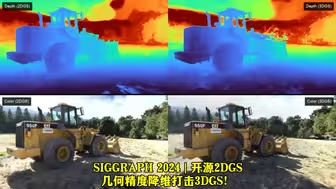
SIGGRAPH 2024 | 上科大开源2DGS!几何精度降维打击3DGS!
SLAM-Viewer,SLAM便捷可视化小工具
IROS’24 Oral开源 | CGDenoiser撕破夜幕的噪声迷雾,提升无人机夜间追踪精度
ECCV'24 Oral | 王东林团队提出PiTe:时空对齐视频大模型,增强视频语义理解,提升视频语言模型性能!
CVPR 2024 | 进一步加速落地:压缩自动驾驶端到端运动规划模型,PlanKD:一种为压缩端到端运动规划器量身定制的知识蒸馏方法
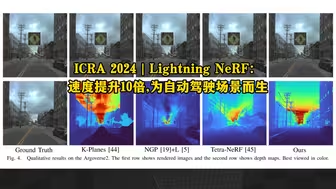
ICRA 2024|Lightning NeRF:速度提升10倍!为自动驾驶场景而生
机器人革命来了!法国开源“模块化人形机器人”Reachy!
SIGGRAPH'24 | 逆天!利用分层3D高斯表示,实时渲染超大规模场景!
视觉惯性-压力SLAM:水下考古遗址在线稠密三维重建
仓储巡检无人机 功能完成度较好的无人机