V
主页
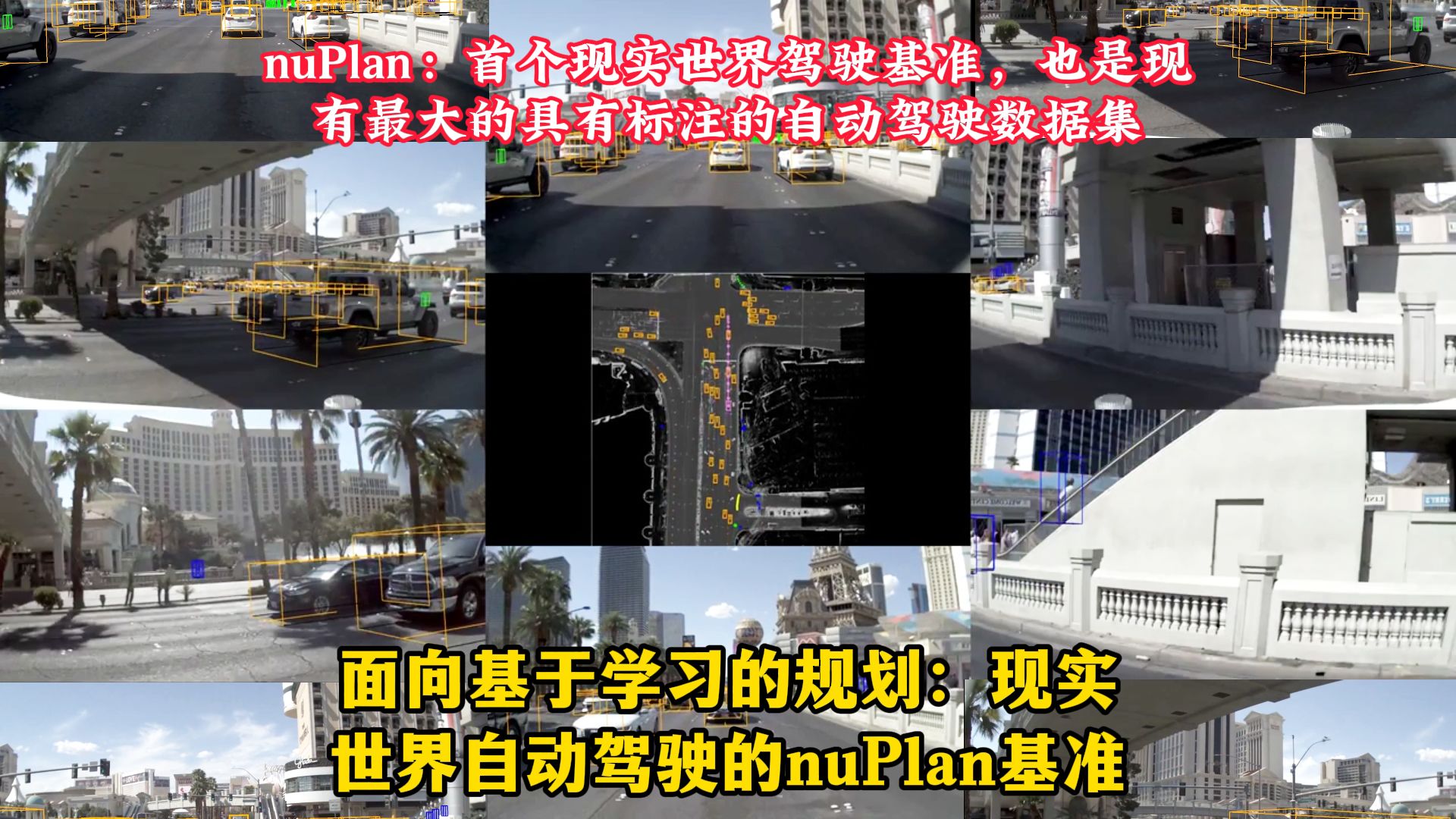
nuPlan:世界上首个现实世界自动驾驶数据集和基准,旨在测试基于机器学习的规划器处理各种驾驶场景以及做出安全且高效决策的能力
发布人
nuPlan数据集是世界上首个现实世界自动驾驶数据集和基准。该基准旨在测试基于机器学习的规划器,处理各种驾驶场景以及做出安全且高效决策的能力。其次nuPlan引入了一个新的大规模数据集,其由来自四个城市的1282个小时的不同驾驶场景组成,并且包括高质量的自动标注目标轨迹和交通信号灯数据。。。。。。
打开封面
下载高清视频
观看高清视频
视频下载器
自动驾驶规划算法岗高频面试题详解
ECCV'24 最新Oral已开源 ! | 用于 3D大场景生成的金字塔扩散模型,实现无限场景生成与高效数据迁移
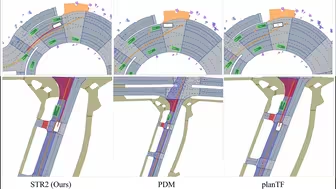
赵行团队新作 | 通过专家混合 模型提升自动驾驶运动规划器的 泛化能力,实现性能新SOTA
超越BEVFusion!DifFUSER:扩散模型杀入自动驾驶多任务(BEV分割+检测双SOTA)
SIGGRAPH'24 | 逆天!利用分层3D高斯表示,实时渲染超大规模场景!
IROS'24 南开大学 | 通过动态拓扑图上的Voronoi划分实现快速且通信高效的多无人机探索
中国科大新作 | 基于3D高斯的多模态融合在无界场景中的定位和重建
NeurlPS'24 开源 | UAV3D 无人机大规模3D感知基准 数据集助力3D目标检测与跟踪
自动驾驶规划控制概况
CVPR 2024 | NVIDIA Research 获 CVPR 自动驾驶国际挑战赛“端到端自动驾驶”赛道冠军
真的超容易“搞深度学习神经网络到底怎么改代码的啊?”复旦博士教我用一本书搞定!
3D Gaussian Splatting在自动驾驶中的应用——建模动态城市场景
移动机器人运动规划
一次刷完Kaggle金融风控/量化/医疗/能源5大顶尖奖金赛!2024最新顶赛合集 0基础Kaggle竞赛速通学习路径 | Kaggle金牌方案精讲
ECCV'24 | Gaussian Grouping解决3DGS的对象级场景理解问题,实现3D场景任意分割和编辑
ECCV'24 oral | DVLO,首个基于深度聚类的多模态融合,双向结构对齐的融合网络新SOTA
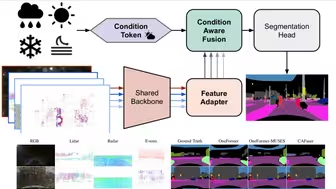
ETH新作CAFuser:条件 感知多模态融合 ,实现对 驾驶场景的稳健语义感知,多个下游任务SOTA!
图像分割、目标检测、特征提取、边缘检测、图像滤波、人脸识别...终于有人把OpenCV那些必备的知识点讲透彻了!从入门到图像处理实战!
究极详细!机器学习深度学习研究生的3年规划路径思维导图,花了我半个多月的时间终于做出来了!
浙江大学,百度 | 显著提升BEV三维物体检测性能的体素池方法:BEVSpread
为什么大学计算机全是深度学习?
ECCV'24 Oral 满分论文 | SpikeYOLO:脉冲神经网络新进展,引领高能低耗目标检测新纪元
综述:自动驾驶的多智能体强化学习,旨在帮助研究人员整合多智能体强化学习技术
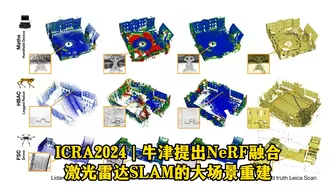
ICRA | 2024:牛津大学针对NeRF和激光雷达的缺点,提出了NeRF融合激光雷达SLAM的大场景重建系统
清华&地平线最新开源!全任务SOTA!SparseDrive:端到端自动驾驶新范式!
ECCV'24 NVIDIA | DiPIR:堪称"变色龙",可将3D物体无缝融合进各种场景,提升视觉真实感
机器人顶级期刊T R O创刊至今首篇全华班Best paper诞生。一种利用分布式无人机机队进行快速协作探索的方法RACER获得Best paper。
自动驾驶主流感知范式:BEV
计算机视觉最不卷的方向:三维重建学习路线梳理
ECCV'24 | 从BEV到OSP:自动驾驶场景建模新趋势,提供更灵活精确的空间预测
深蓝自动驾驶套件测试Apollo 6.0
YOLO版本再升级 !YOLOv10:优化架构与无NMS训练提升实时目标检测效率
全球首个基于大语言模型的自动驾驶语言控制模型(CAVG),今我以语驭风车!
无视干扰,谷歌开源SpotlessSplats:3D场景重建中的干扰物识别与排除
与CityDreamer相比速度提高60倍!GaussianCity:重建你的无人机视图与自动驾驶场景【可在主页预约四场与”3DGS ”相关的公开直播课
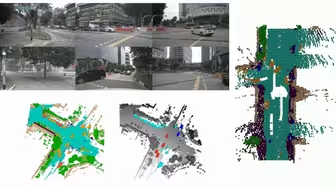
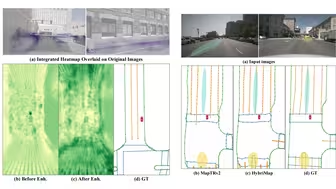
HybriMap:结合PV和BEV特征的高清地图构建技术,实现nuScenes数据集性能提升4%
强化学习训练8小时,AI学会了通关益智解谜游戏
MAVIS:使用基于SE2(3)的精确IMU预积分的多摄像头增强视觉惯性SLAM,该研究成果已被icra2024接受。
清华最新综述:第一个专门针对NeRF在自动驾驶领域应用的调查,旨在弥补当前文献中存在的明显空白
ECCV'24 Oral | MVSplat:从稀疏多视图图像中实现高效的3DGS,用更少的参数,速度快2倍,还能跨数据集泛化