V
主页
ECCV'24 | 从BEV到OSP:自动驾驶场景建模新趋势,提供更灵活精确的空间预测
发布人
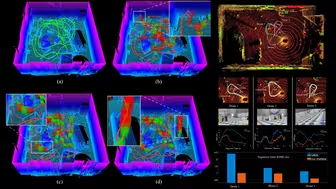
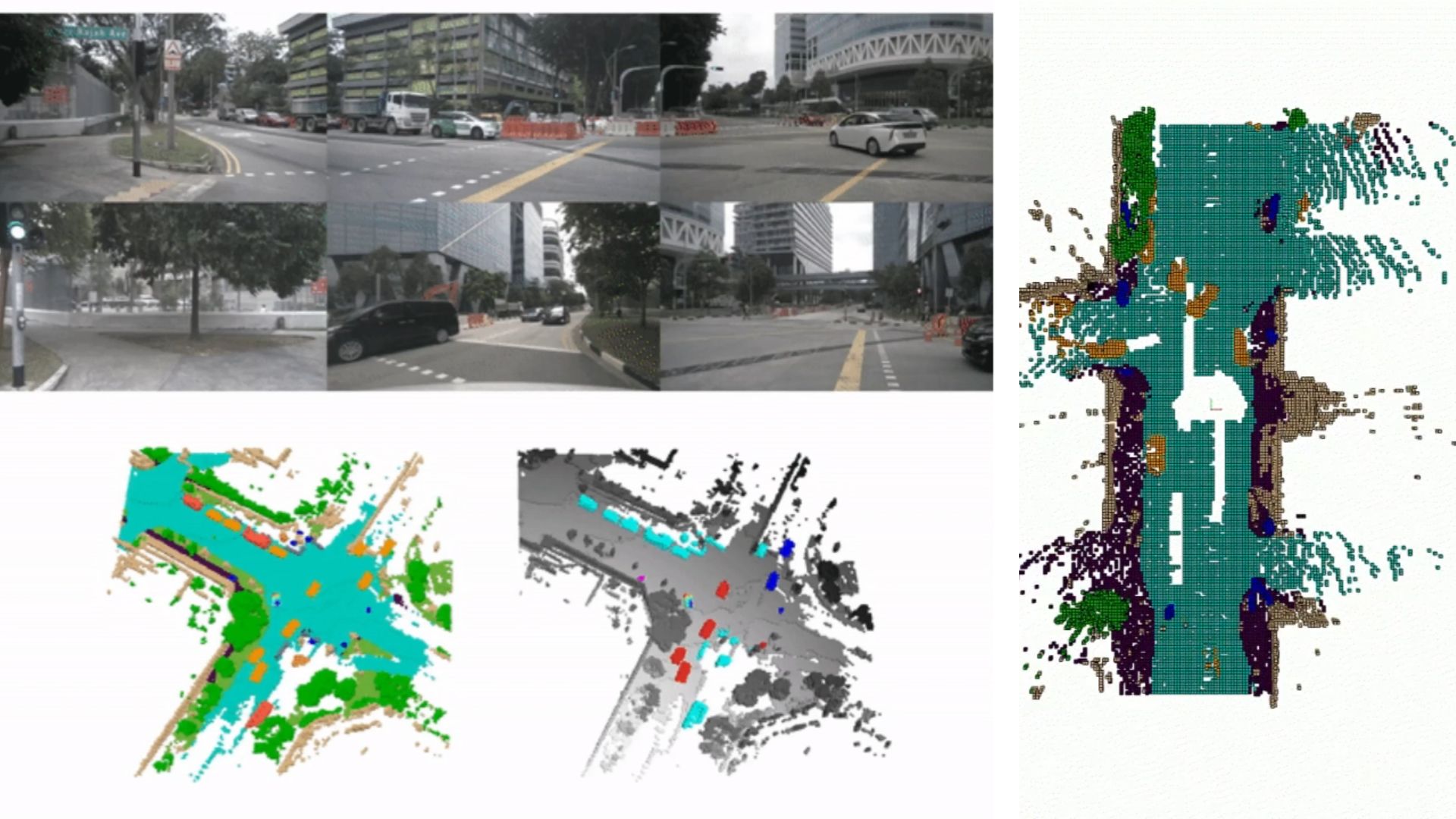
+“SLYYDS24”,领【24年100篇最新智驾论文➕多领域面试真题➕公开课课件回放➕高质量交流群】,备<100> 该研究为三维占据网格预测提供了一种全新的思路,在性能和灵活性上都有优越性平均交并比(mIoU)超过了基于 BEV 表征的方法;得益于自定义稀疏点集(PoIs)的高度灵活性,本方法可以端到端地输出任意位置的状态信息,也可以用于增强 BEV 表征的方法。。。。。。 标题:Occupancy as Set of Points 链接:https://arxiv.org/html/2407.04049v1
打开封面
下载高清视频
观看高清视频
视频下载器
超越BEVFusion!DifFUSER:扩散模型杀入自动驾驶多任务(BEV分割+检测双SOTA)
CVPR2024 | RCBEVDet:毫米波雷达-相机在BEV空间下的融合方案
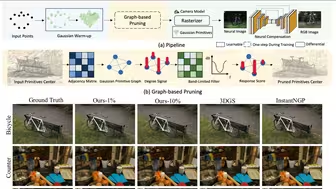
SIGGRAPH'24 | 逆天!利用分层3D高斯表示,实时渲染超大规模场景!
HybriMap:结合PV和BEV特征的高清地图构建技术,实现nuScenes数据集性能提升4%
NeurlPS'24 开源 | DC-Gaussian,基于3DGS的行车记录仪视频场景重建,有效去除反射遮挡
端到端智能驾驶系统的优势与实现方式,以及端到端智能驾驶系统是自动驾驶的未来吗?
自动驾驶主流感知范式:BEV
全面评估BEV感知算法: RoboBEV基准测试与 鲁棒性增强策略探索,
ETH最新!CVPR | 2024NeLF-Pro:用于多尺度新视图合成的神经光场探针,一个方法解决多种规模场景的快速渲染重建
StreamPETR—作分享:稀疏向量化表征长时序建模
与CityDreamer相比速度提高60倍!GaussianCity:重建你的无人机视图与自动驾驶场景【可在主页预约四场与”3DGS ”相关的公开直播课
自动驾驶规划算法岗高频面试题详解
ECCV'2024 北航、极氪领衔 | FSD-BEV:大幅度提升基于视觉的3D目标检测算法性能,实现感知新SOTA!
闭环 SOTA | 首个基于MLLM的自动驾驶规划系统,性能高,Token少!
大模型时代下的端到端自动驾驶(上篇)
多传感器融合感知
BEVFormer一作分享,基于时空融合的BEV感知”
CVPR'24 Highlight 北大 | 扩展动态人景交互建模新突破, 生成的动作质量均优于现有技术
CVPR 2024 | 进一步加速落地:压缩自动驾驶端到端运动规划模型,PlanKD:一种为压缩端到端运动规划器量身定制的知识蒸馏方法
一窥大神们与中国智驾的这些年,入局智能驾驶汽车领域的12大企业的技术灵魂人物#端到端#人工智能#自动驾驶#智能驾驶#BEV感知#车载
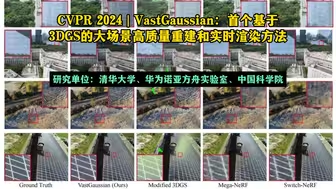
CVPR 2024 | VastGaussian:首个基于3D GS的大场景高质量重建和实时渲染方法,出自清华大学、华为诺亚方舟实验室、中国科学院
基于深度学习的自动驾驶控制模拟(复现钱彬csdn播客)
来自民间的30项关于特斯拉FSD v12版本 以上的实测,带你深度感受端到端 自动驾驶技术线路的优缺点
来自Meta团队的SceneScript,LLM赋能“3D场景重建”,引爆你的AR/VR等应用体验,惊艳效果超越你的想象!
ECCV'24开源 | LocoTrack: 塑造SLAM新纪元!6倍加速! 跟踪一切最新SOTA!
自动驾驶行业中的BEV感知技术之美,上帝视角观摩感知技术
无视干扰,谷歌开源SpotlessSplats:3D场景重建中的干扰物识别与排除
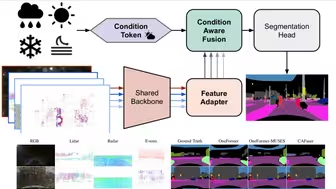
ETH新作CAFuser:条件 感知多模态融合 ,实现对 驾驶场景的稳健语义感知,多个下游任务SOTA!
自动驾驶规划控制概况
告别3DGS算法,开源SUNDAE,实现内存效率与图像质量的双赢
ECCV '24 CVPPA | KAN你能看见吗? KAN网络与 Sentinel卫星结合实现 高效且可解释的作物田地分割
全球首个开源自动驾驶场景3DGS工作—S Gaussian:用于自动驾驶的自监督街道高斯,无需标注,就可实现逼真的街景重建
端到端智驾是什么?有什么优点?信息量大,没耐心就不要点啦~
三维重建入门到精通,30分钟教你学会运动恢复结构SFM
自动驾驶公司招聘最看重什么?
Waymo研发经理|自动驾驶感知前沿技术介绍
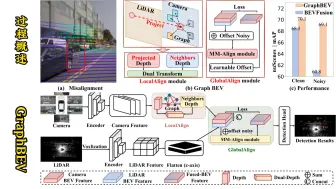
超越BEVFusion!GraphBEV:解决多模态特征不对齐和噪声问题,助力量产
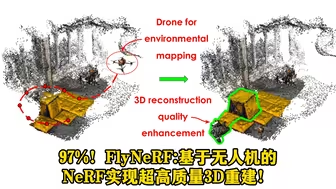
97%!FlyNeRF:基于无人机的NeRF实现超高质量3D重建!
跨域无人军团出征 清华 | LVCP 无需精确先验,基于密切集成 的协同实时相对定位
浙大、上海人工智能实验室等即将开源PGSR: 平面3DGS提升表面几何,超越 2DGS、GOF,实现渲染新高度