V
主页
前沿| 蓖麻油,让软体机器人获得自愈功能!
发布人
目前,软体机器人不是可持续的,因为1.其软体对不同类型的损害的脆弱性导致有限的寿命,2.制造它们的材料是以化石为基础的,以及3.它们通常由化学交联材料,主要是硅酮,具有较差的可回收性和生物降解性。
打开封面
下载高清视频
观看高清视频
视频下载器
【2.TogetherROS系统安装与配置】基于ROS2 | 更强的AI能力 | 开源系统
OriginBot智能机器人开源套件功能演示
前沿| MIT造出“厘米级”类昆虫机器人,断翅也能飞!
前沿| 受千足虫启发的多节机器人,可轻松穿越3D地形
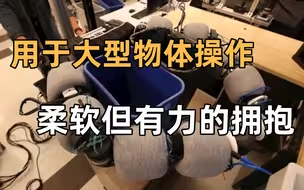
前沿| Punyo-1—可抱起大型物体的柔顺机器人
《从零开发智能四轮小车》| 智能车 | DIY | 通信协议 | 应用功能【课程试看】
前沿| 牛津大学在机器人骨架上训练人类肌肉
【公开课】 古月• 第三讲《TogetherROS移动机器人驱动开发》 | 智能小车| SLAM地图构建| ROS2
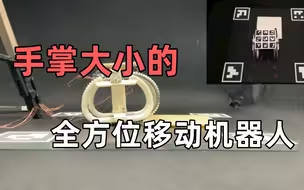
前沿| 由2自由度环形轮驱动的手掌大小的全方位移动机器人
前沿|这款仿生机器人将清理全球海洋垃圾
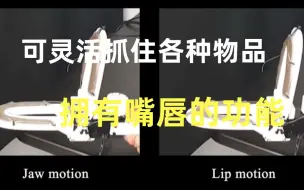
前沿|模仿下巴和唇部动作的软体抓手?它像嘴唇一样能收缩!
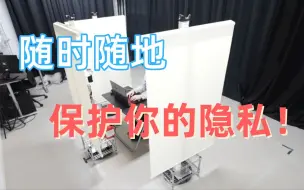
前沿| 能听指令移动的围墙你见过没?
前沿|先进的月球机器人漫步车“R1”,勘探、采矿不在话下!
【公开课】 古月• 第五讲《TogetherROS移动机器人SLAM地图构建》 | 智能小车| SLAM地图构建| ROS2
【公开课】 古月• 第二讲《TogetherROS移动机器人系统设计》 | 智能小车| SLAM地图构建| ROS2
前沿|未来的自重构机器人
前沿| 看看有史以来最美味的机器人
【古月居】ROS机器人开发案例
MuJoCo机器人强化学习仿真入门|从零开始的MuJoCo世界生活之强化学习篇【课程试看】
前沿 | ARTEMIS: 先进的机器人技术提高了移动性和稳定性
前沿|新机器人系统助外科医生远程治疗中风,登上《Science Robotics》!
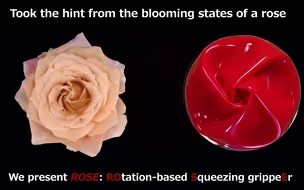
前沿|ROSE—酷似玫瑰的新型柔性抓取器
【公开课】古月精讲 · ROS移动机器人实战 | ROS入门必看!
基于深度学习的机器人平面抓取【课程试看】
前沿| 华盛顿大学开发出定制抓手,帮助机器人拿起几乎任何东西
前沿|创意机器人——通过膨胀或收缩车轮主动改变形状
【公开课】 古月• 第四讲《TogetherROS移动机器人视觉应用》 | 智能小车| SLAM地图构建| ROS2
【公开课】 古月• 第六讲《TogetherROS移动机器人自主导航》 | 智能小车| SLAM地图构建| ROS2
3、4自由度机械臂正逆解推导与代码实现 【课程试看】
【开源项目】低成本开源四足机器人
PID参数整定与模糊自适应PID【课程试看】
【直播回放】第2期|开源项目机器狗训练营——实操讲解机器狗运动控制算法
前沿| 空中龙形机器人重构为飞行机械手
前沿| 自动驾驶自行车存在哪些挑战?
前沿| 人类引导下的贝叶斯学习—突破机器人运动规划的难题
家庭服务机器人能为你的日常做什么
【直播回放】OriginBot系列直播:深度解析机器人开发
前沿丨想要分身?多材料3D打印机器人帮你实现!
前沿| Skydio Dock无人机,让环境感知不再困难
前沿| Flexiv祝世界鸡尾酒日快乐!