V
主页
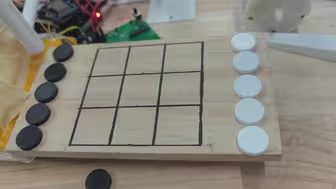
3、4自由度机械臂正逆解推导与代码实现 【课程试看】
发布人
本视频为试看课程,详情请看:https://appougfvr0w9908.h5.xiaoeknow.com/v1/course/column/p_61839a62e4b0ac1ecd65bf47?type=3 本系列旨在教会大家从零制作一个视觉抓取机械臂实物出来,教程选用的都是淘宝上常见且便宜的机械臂与相机,实现了对淘宝上最常见的3种自由度的机械臂(下图所示)的运动学控制,实现了全部都要,让有选择困难的你不再纠结!
打开封面
下载高清视频
观看高清视频
视频下载器
【公开课】古月精讲 · ROS移动机器人实战 | ROS入门必看!
前沿|移动机械臂 送水不洒的同时还能躲避球
【古月居】古月·ROS2入门21讲 | 带你认识一个全新的机器人操作系统
《移动机器人安全控制与安全强化学习》|自动驾驶|社交机器人|人机交互|安全控制【课程试看】
《从零开发智能四轮小车》| 智能车 | DIY | 通信协议 | 应用功能【课程试看】
【古月居】ROS机器人开发案例
前沿|生物就是最好的抓取器
机器人公司终于来了位00后运营,领导非常放心,大家觉得怎么样?
OriginBot智能机器人开源套件使用指南
移动机器人目标检测YOLOv5【课程试看】
《多刚体系统动力学建模及MATLAB仿真》|MATLAB|机械臂|仿真测试|控制算法开发【课程试看】
前沿| 蓖麻油,让软体机器人获得自愈功能!
基于栅格地图的机器人路径规划算法指南• 黎万洪【课程试看】
前沿| 最像人的人形机器人ameca,这些新表情逼真到令人恐惧
OriginBot开源智能小车,支持ROS2/TogetherROS,算力强劲性能爆表,创客性价比之选!
(开源)最迷你的ROS2 机器人,自动路径规划、视觉识别、人体检测跟随、手势识别控制、多形态切换(想要资料评论区留言安排!)
AI开发,何必从零开始?地平线旭日X3派开发板-更强的算力国产树莓派替代
【公开课】 古月• 第五讲《TogetherROS移动机器人SLAM地图构建》 | 智能小车| SLAM地图构建| ROS2
MuJoCo机器人阻抗控制仿真【课程试看】
电赛E题 树莓派写完的 搞了有一会 队友调的机械臂(自己打印的)纯手搓
【直播回放】第1期|开源项目机器狗训练营——机器狗基础知识
《PyTorch入门:一起从零搭建神经网络 》ROS| 网络项目开发| pycharm| 环境搭建【课程试看】
ROS平台下 FRANKA EMIKA 机器人实例展示 - 潘工|2021ROS暑期学校 第七天精剪回放
【古月居】ROS机械臂开发原理
前沿| 用机械臂做篮球架!这能不进球?
Matlab机器人工具箱入门指南|从机器人建模到仿真【课程试看】
【机器学习】如何基于视觉深度强化学习实现机械臂抓取【课程试看】
【直播回放】备赛解读——第十九届智能车竞赛:地平线智慧医疗智能车创意组
PID参数整定与模糊自适应PID【课程试看】
谭剑波-你知道为什么很多人老学不进去吗?其中一个难以启齿又极其重要的原因看完你会知道!
《面阵激光雷达SLAM》| C++| livox-loam、fastlio、r3live【课程试看】
【开源项目】低成本开源四足机器人
前沿|未来的自重构机器人
基于Matlab的simulink机械臂可视化仿真教程|适用于小白、初学者等【课程试看】
Nature 智能机器'24-7-封面,使用强化学习和生成预训练AI模型,举一反三,实现四足机器人逼真的敏捷性和游戏性!
前沿| 人类引导下的贝叶斯学习—突破机器人运动规划的难题
【直播回放】第2期|开源项目机器狗训练营——实操讲解机器狗运动控制算法
前沿| 牛津大学在机器人骨架上训练人类肌肉
前沿| MIT使用可重新编程的磁性像素进行选择性自组装
前沿|无人机羽毛球——低视力人群运动的福音