V
主页
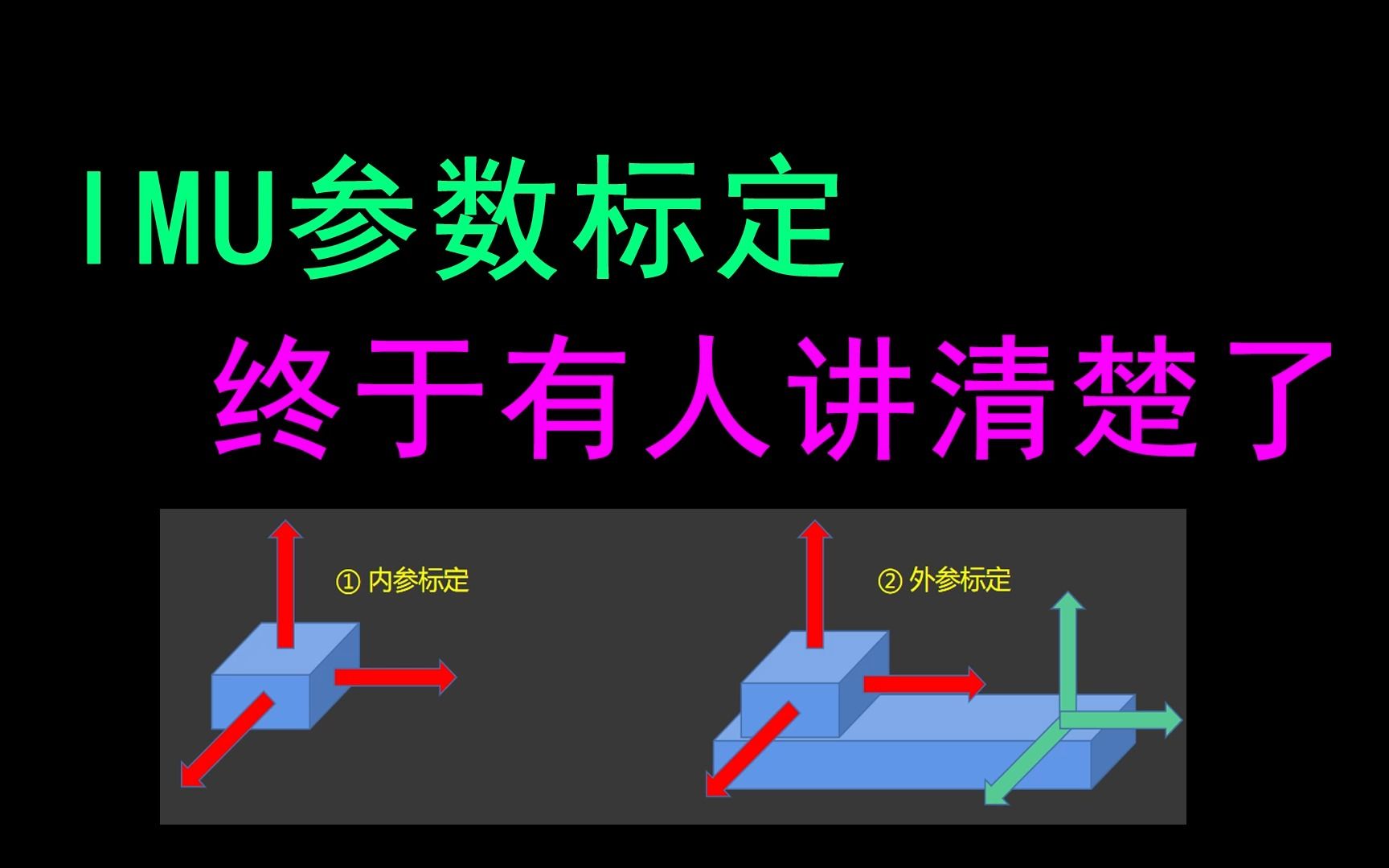
IMU参数标定终于有人讲清楚了
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
使用 IMU(陀螺仪和加速度计)在 6DOF(俯仰、滚动、偏航和 x、y、z 位移)中进行步态跟踪
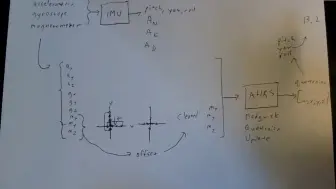
IMU选型、标定误差分析、AHRS组合导航
标定工程师:CANape工具详解【完】
MEMS传感器2:加速,旋转——陀螺仪工作原理
IMU 原理简介
【深度教学】姿态解算理论及应用(持续更新)
【填鸭式笔记】纯惯导数据(IMU)的姿态、位置解算探索
imu定位
干货!加速度传感器使用及标定的使用注意事项修改
学习心得|基于卡尔曼滤波的MPU6050姿态解算
【标定】机器人手眼标定-方法及原理
三轴光纤陀螺和MEMS IMU内部构成和工作原理动画演示
从零做飞控(4)IMU加速度计和陀螺仪的互补滤波
【官方中字】了解传感器融合和跟踪 (全6P)MATLAB&Simulink
Kalibr相机及IMU校准教程(Tutorial: IMU-camera calibration)
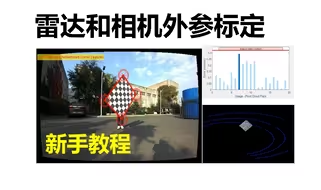
激光雷达和相机的标定
老外讲如何通过 imu 得到 世界坐标系下姿态角度
卡尔曼滤波与组合导航原理【西北工业大学 严恭敏】
imu姿态解算-六轴融合算法
大疆无人机软件故障维修,云台标定报错imu消错,无法起飞40011和40021等教程
【只想调包】IMU姿态估计可视化 Arduino Nano33 Sense 实例演示
MEMS传感器1:3轴加速度计工作原理揭秘,与这些有关
IMU惯导模组知识+行业大揭秘
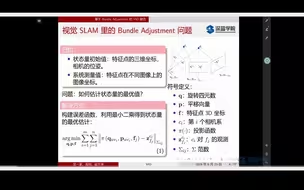
3-2 视觉SLAM与IMU的vio组合
陀螺仪加速度计MPU6050模块应用!加上卡尔曼滤波果然就不一样。
基于深度学习的智能手机IMU 3d运动轨迹重建,用于3d室内定位
从放弃到精通!卡尔曼滤波从理论到实践~
卡尔曼Kalman滤波实例讲解:MPU6050加速度计陀螺仪数据解算与融合滤波,附代码
多传感器融合的本质
IMU惯性导航
无人机IMU校准!必看!
《机器人SLAM导航核心技术与实战》书籍配套教学视频
37基于matlab的IMU姿态解算,姿态类型为四元数;角速度和线加速度的类型为三维向量。IMU全称是惯性导航系统,主要元件有陀螺仪、加速度计和磁力计。
如何使用IMU来精确定位车辆和导航
搞懂了!原来激光雷达和相机的内外参是这样标定的
武汉大学研究生组合导航课程合集【2022年春】
MPU6050(DMP)简单读一下数据
大疆无人机IMU有什么作用?惯性测量单元,校准步骤是怎样的?
【浅显易懂】卡尔曼滤波原理解读
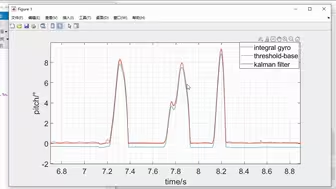
IMU三种估计姿态的方法对比