V
主页
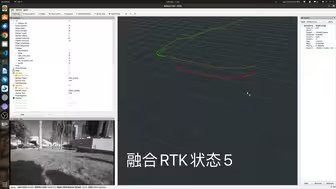
多传感器融合的本质
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
多传感器融合-第一部分
《自主无人系统多传感器融合技术》 - 北理工沈凯
多传感器融合感知
IMU的数据为什么要滤波
【浅显易懂】卡尔曼滤波原理解读
手把手教你利用MATLAB对传感器数据进行分析(预处理、流式算法、代码生成)
自动驾驶多传感器数据融合(2):IMU和GPS的融合定位
【传感器融合】3:如何融合GPS和IMU
多传感器融合定位,VIO+RTK+轮子,解决假固定解,视觉遮挡,轮子打滑等各种问题。
基于单片机的多传感器融合的火灾报警器/基于单片机的带火焰传感器的火灾报警器/能够对火焰、温度、烟雾/可燃气体同时进行监测,达到更好的火灾报警效果
第九讲:潘泉《自动化技术之信息融合》
搞SLAM算法还有前途吗
多传感器融合感知技术的前沿算法与应用,包括Pointpillars、spconv+、BEVDet、LSS等
基于多源传感器融合的机器人定位与建图 | 浙江大学副教授张宇【附PPT】
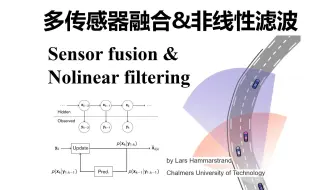
《多传感器融合与非线性滤波》
激光-视觉-IMU-GPS融合SLAM系列课程-传感器介绍与代表性SLAM解析
数据融合算法
传感器 多种传感器数据融合的技巧和应用
IMU参数标定终于有人讲清楚了
【AI Drive】天津大学副教授张长青:多模态融合的基础问题及算法研究
ROS2之多传感器融合包Robot-Localization的使用
卡尔曼滤波的本质
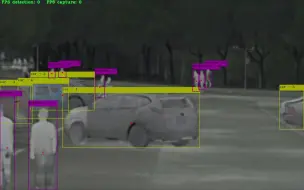
基于多传感器(毫米波雷达+可见光相机+红外相机)融合的(全天候)车辆前景目标检测与跟踪
粒子滤波的本质
基于图像与雷达的数据融合算法
激光雷达视觉融合完成了,这次效果好了,重合了,嘎嘎香。
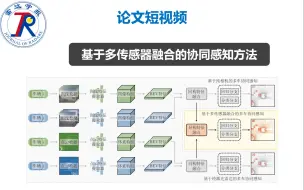
论文短视频 | 基于多传感器融合的协同感知方法
太详细了!多传感器融合的策略和方法
一文搞懂数据融合理论、方法和应用,快速理清AI+大规模数据、复杂数据集等入门难点
什么是SLAM
为什么需要多传感器融合
IMU 原理简介
基于地平线视觉感知的多传感器融合定位量产方案,自动驾驶实车测试demo
【官方中字】了解传感器融合和跟踪 (全6P)MATLAB&Simulink
自动驾驶的多传感器数据融合技术分享
传感器融合的数学基础 [完结] Sensor Fusion 2020 (挪威科技大学)
【信息融合】基于matlab扩展卡尔曼滤波雷达数据和红外数据融合【含Matlab源码 3596期】
卡尔曼Kalman滤波实例讲解:MPU6050加速度计陀螺仪数据解算与融合滤波,附代码
使用扩展卡尔曼滤波器 (EKF) 进行传感器融合定位
深度学习不会特征融合一定要死记这6中方法,非常实用!