V
主页
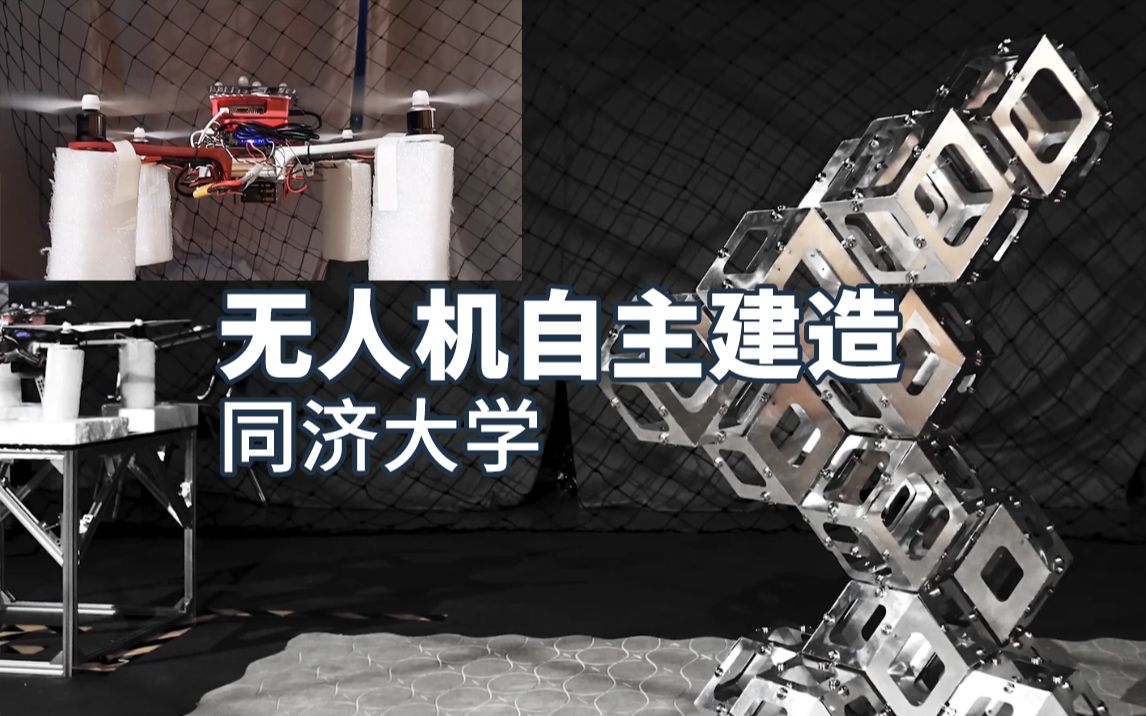
双机协同离散结构自主建造-同济大学建筑与城市规划学院
发布人
双机协同离散结构自主建造-同济大学建筑与城市规划学院 实验通过现场双机协同建造实验的具体分析,展示研究中实验环境建立、整体结构生形、离散单元设计、建造时序优化和双机智能协同的无人机离散单元建造的整体流程和优化策略,为集群智能体自主建造提出了进一步研究的思路和方法。 无人机自主建造中,需要得到无人机精确空间位置信息,使用了NOKOV度量动作捕捉系统进行无人机室内定位。 了解详细案例介绍,可在微信搜索关注公众号:NOKOV度量科技。
打开封面
下载高清视频
观看高清视频
视频下载器
制作开源无人机 - Make an Open Source Drone
浙大FAST-Lab高飞团队 IROS 2023发布研究新进展
【视觉动捕】2024 Look Ma, no markers Holistic performance capture without the hassle
未知复杂环境的无人机自主目标搜寻 四川大学电信学院杨鑫松老师团队
北理工&哈里发大学 卫星信号拒止海洋环境的多阶段无人船自主导航
无人车自主导航+规划避障——浙江大学控制学院高飞&曹燕军
Crazyflie无人机集群编队研究——北京航空航天大学
灵巧手、肌电假肢手技术发展到哪一步了?看方斌对话01期-人机共融的协同交互操作
无人机倾斜穿越动态狭缝 | 国防科技大学
空地协同侦察原型系统——分布式异构集群编队与跟踪控制
动作捕捉在协同控制、机械臂、无人机无人车、仿生机器人中的应用
Science Robotics 北大刘珂老师分享顶刊经验 软体机器人成果及研究过程 - 机器人学术年会顶刊论坛
多无人机协同控制-河北工业大学
RMUA 2023 备赛知识点!无人机定位和评分系统中的动作捕捉使用详解!
【动作捕捉经典案例】NOKOV动作捕捉用于人体步态分析与动力假肢研究
生机电一体化穿戴式机器人的研发(转自新华网)
最低成本入门无人机!
一场有温度的学术对话《方斌对话》操纵可变形物体 挑战与机遇
浙大高飞老师团队ICRA 2024:基于主动碰撞的轮式机器人路径规划方法
增强现实AR-触觉人机交互界面已应用于超声扫描机器人!《方斌对话》直播首邀外籍教授,三人精彩共话人机协同操作!
多智能体协同控制实验平台(转自新华网)
3分钟了解什么是动作捕捉@2022高博会
仿生壁虎机器人-武汉理工大学交通物流工程学院梅杰老师
北理工成果登央视!实现半机械昆虫飞行控制,成功率可达89%
浙大FAST-Lab高飞9/27直播精彩剪辑
动作捕捉系统在步态分析中的应用——NOKOV小讲堂
《自然·通讯》后再登IEEE RA-L!北航研究团队发表基于Mean-Shift的分布式无分配算法 实现精准高效的多机器人队形控制【IROS 2024】
冰雪运动科学实验室-东北师范大学体育学院
【AI动作捕捉】输入舞蹈视频实时生成3D舞蹈动作数据,连接UE5输出三渲二动画,全新1.6.0版本已经灰度测试
不到百元做带图传的无人机
无人机室内飞行控制-西北工业大学张通团队
北京工业大学自动驾驶仿真实训平台,丰富多车及车路协同实训教学
中科院自动化所蒲志强团队:智能无人集群系统虚实融合闭环验证
IEEE RAL:背部外骨骼 高度兼容人体躯干运动
使用增强现实AR-触觉混合人机交互界面的人机协作互补新框架
《大模型驱动下机器人自主能力的新探索》浙大高飞 牛津赫亮 中大周博宇 苏黎世理工Diego Paez参与讨论 吉大高一星主持 | Star Talk直播回放
斯坦福合成物理模拟手灵巧动作-虚拟吉他手精准演奏未训练曲目
如何走科技特长生路线?装室内飞穿越机,要啥配件花多少钱?
Soft Robotics最新成果:人类“第三只手”高效准确完成复杂任务遥操作
【动作捕捉经典案例】无人车集群自主穿越障碍