V
主页
未知复杂环境的无人机自主目标搜寻 四川大学电信学院杨鑫松老师团队
发布人
四川大学电子信息学院杨鑫松老师团队实现大迷宫及复数楼层无人机自主目标搜寻。仿真实验中使用PX4仿真器,能在完全未知的复杂环境下自主搜寻目标,并将目标位置在构建的地图上标注。 研究使用NOKOV度量动作捕捉系统,用于获取无人机及无人车的位置信息,进行实时室内定位。 更多精彩案例,欢迎关注公众号:度量的机器人世界
打开封面
下载高清视频
观看高清视频
视频下载器
机器人顶会RSS 2024:湖南大学周易教授聊无人机无地图状态评估 - 基于事件的视觉惯性测速仪
浙大高飞老师团队ICRA 2024:基于主动碰撞的轮式机器人路径规划方法
浙大高飞团队IROS 2023新成果:适用于任意形状机器人轨迹优化的高效算法
浙大FAST-Lab高飞团队 IROS 2023发布研究新进展
北理工成果登央视!实现半机械昆虫飞行控制,成功率可达89%
无人机编队避障-北京理工大学方浩教授团队
室内多无人机任务重规划实验-南航自动化学院姜斌老师团队
无人车自主导航+规划避障——浙江大学控制学院高飞&曹燕军
浙大FAST-Lab高飞老师9/27开播啦!
Crazyflie无人机集群编队研究——北京航空航天大学
《大模型驱动下机器人自主能力的新探索》浙大高飞 牛津赫亮 中大周博宇 苏黎世理工Diego Paez参与讨论 吉大高一星主持 | Star Talk直播回放
无人机室内飞行控制-西北工业大学张通团队
北理工&哈里发大学 卫星信号拒止海洋环境的多阶段无人船自主导航
可飞可爬可滚!哈工大IEEE RA-L发表陆空机器人 三种模式丝滑转换!
ICRA 现场精彩片段 - STAR TALK 小组讨论《大模型驱动下机器人自主能力的新探索》
复杂海洋环境的无人系统构建,海洋异构无人系统workshop回顾@IROS
无人机飞行姿态动作捕捉-南京大学陶先平教授团队
机器人穿衣只能穿一只手?朱吉鸿老师回应“第二只手”难题!
ICRA 2024参会攻略:上交王贺升教授教你听会社交两不误【度量访问】
浙大Fast-Lab高飞老师 详解第二届ARTS 自主机器人技术研讨会
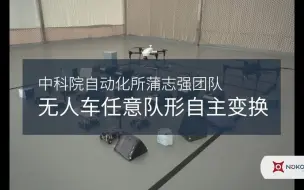
中科院自动化所蒲志强团队:智能无人集群系统虚实融合闭环验证
ICRA2024:基于RRT*方法的连续体机器人动态环境轨迹规划
动作捕捉在协同控制、机械臂、无人机无人车、仿生机器人中的应用
3分钟了解什么是动作捕捉@2022高博会
Soft Robotics最新成果:人类“第三只手”高效准确完成复杂任务遥操作
仿生壁虎机器人-武汉理工大学交通物流工程学院梅杰老师
ICRA2023 论文讲解 | 四旋翼飞行器 基于多面体表示的障碍物感知拓扑规划
无人机多机编队协同控制-江苏科技大学
ICRA 2023 现场直击 Crazyflie 无人机避障 & 随机飞行
双机协同离散结构自主建造-同济大学建筑与城市规划学院
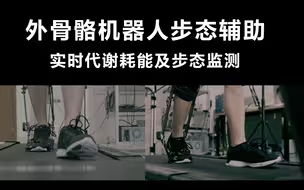
外骨骼机器人步态辅助实时代谢消耗及步态监测-南开大学
基于传感器的机器人系统运动控制
IEEE RA-L & ICRA 2024 绳牵引并联机器人动态避障算法
登Interface期刊封面!首次基于真实集群机器人系统的临界假说验证实验
浙大FAST-Lab高飞老师9/27开播,直播内容先睹为快!
使用增强现实AR-触觉混合人机交互界面的人机协作互补新框架
灵巧手、肌电假肢手技术发展到哪一步了?看方斌对话01期-人机共融的协同交互操作
【动作捕捉经典案例】无人车任意队形自主变换
浙大Fast-Lab高飞分享发顶刊Science Robotics T-RO RA-L经验
光学动作捕捉系统原理——NOKOV小讲堂