V
主页
京东 11.11 红包
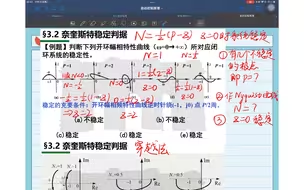
自动控制原理/奈奎斯特稳定判据2
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
自动控制原理/奈奎斯特曲线/伯德图
自动控制原理/劳斯稳定判据/稳定裕量
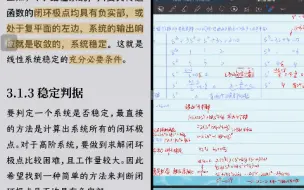
自动控制原理/奈奎斯特稳定判据1
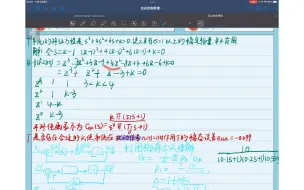
自动控制原理/奈奎斯特稳定判据如何应用/正负穿越法
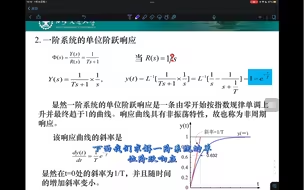
自动控制原理/一阶系统数学模型/阶跃响应/改善性能方法
自动控制原理/稳定裕度-相角裕度
自动控制原理/幅值稳定裕度/相角稳定裕度计算
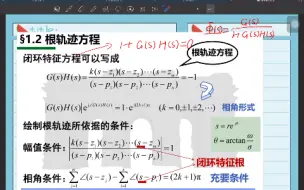
自动控制原理/相角条件/根轨迹
自动控制原理/复阻抗法求传递函数
自动控制原理/梅森公式/误差传递函数
频率特性/幅相特性曲线/对数频率特性
机器人学 l 3.4 逆向运动学相关的三方面问题
自动控制原理/二阶系统各参数求解/等效开环传递函数
自动控制原理/由伯德图求开环传递函数
自动控制原理/频域分析/稳态输出
自动控制原理/劳斯稳定判据
自动控制原理/西安交通大学/数学模型/微分方程
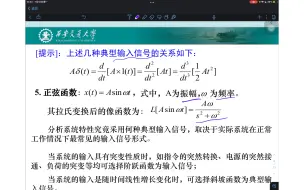
自动控制原理/典型输入信号/常用性能指标/西安交通大学
自动控制原理/已知时域表达式 求复数域表达式
自动控制原理/伯德图绘制
机器人学 l 7.3.3 笛卡尔空间中的轨迹规划
液压与气动技术 l 液压基本回路习题讲解1-4
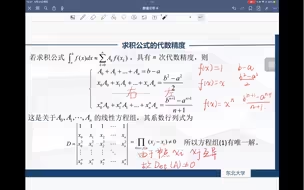
数值分析 l 第37讲 数值求积公式的代数精度
自动控制原理/稳态误差求解的推导过程
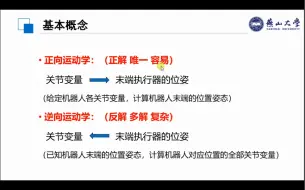
机器人学 l 3.3机器人逆向运动学(以puma560为例)
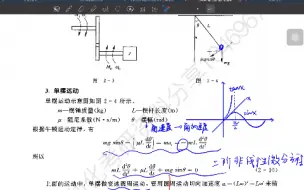
自动控制原理/非线性微分方程的线性化
机器人学 l 7.3.1 笛卡尔空间的轨迹规划
机器人学 l 7.1 机器人轨迹规划的相关概念
机器人学 l 7.3.2 笛卡尔空间中的轨迹规划
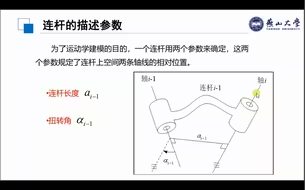
机器人学 l 3.1 连杆参数和关节变量
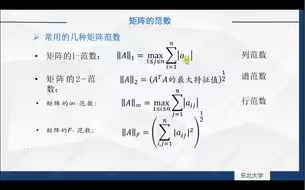
数值分析 l 第19讲 矩阵范数
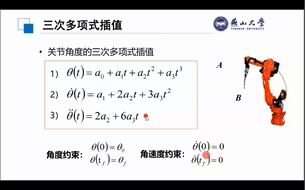
机器人学 l 7.2 轨迹规划中的三次多项式插值
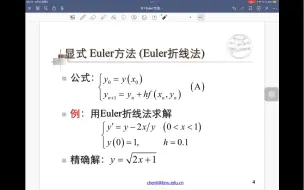
数值分析 |第40讲|常微分方程初值问题的数值解法——Euler方法
数值分析 | 第一讲 绪论
25控制考研自动控制原理每日一题—10.16
自动控制原理|稳态误差|判稳不可少
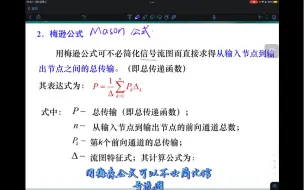
自动控制原理/梅森公式/信号流图/系统数学模型总结/西安交通大学
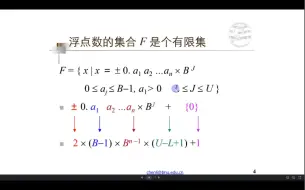
数值分析 | 第2讲 浮点数
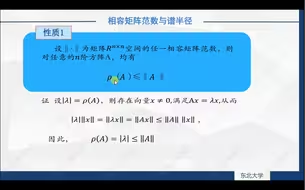
数值分析 l 第20讲 相容矩阵范数与谱半径
数值分析 | 第13讲 线性方程组的矩阵三角分解法(LU三角分解)