V
主页
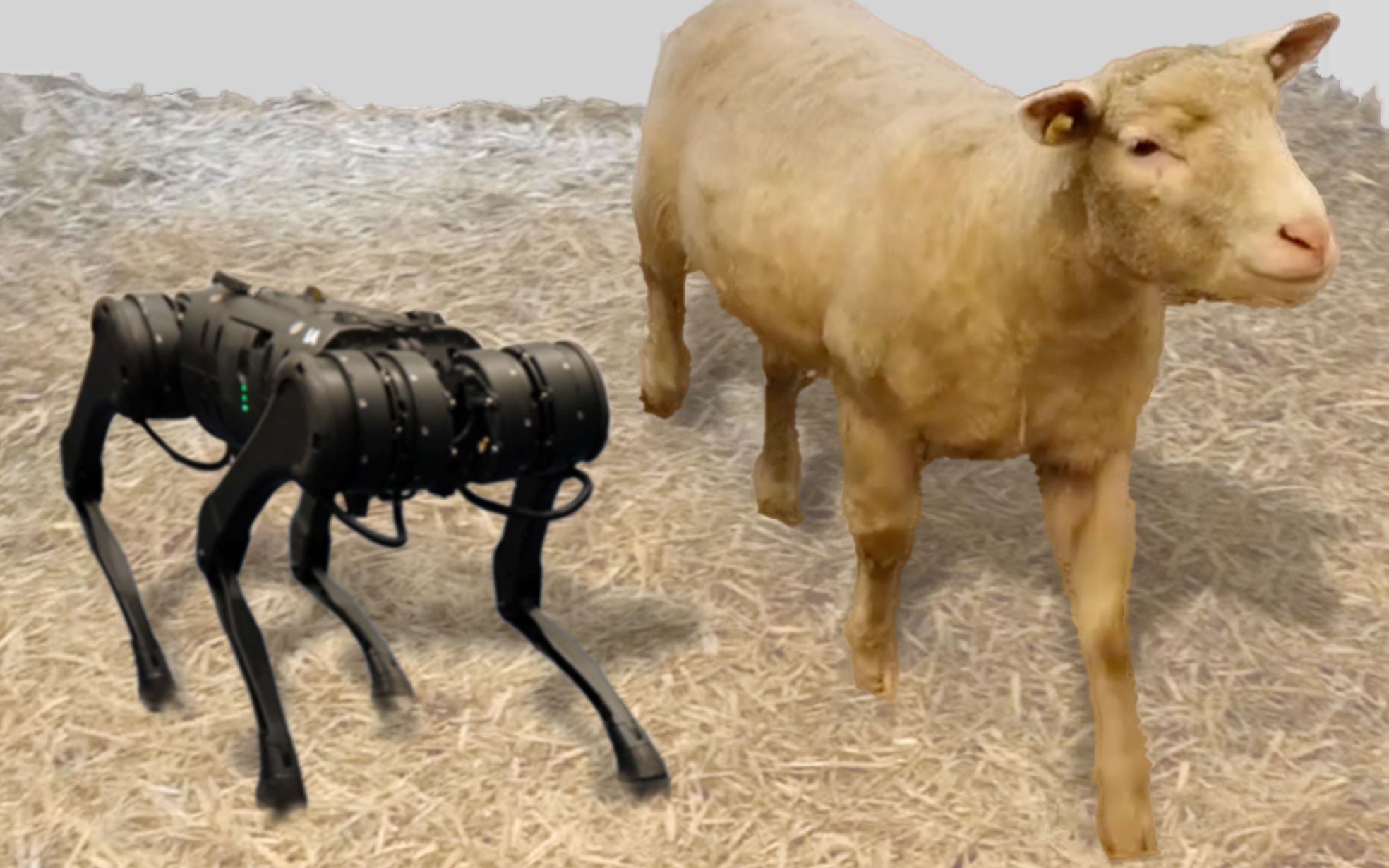
四足机器人复制动物运动方式|2022 IROS【苏黎世联邦理工】
发布人
项目网站:https://donghok.me/animal-motions-on-legged-robots/ 论文:"Animal Motions on Legged Robots Using Nonlinear Model Predictive Control" by Dongho Kang, Flavio De Vincenti, Naomi C. Adam, and Stelian Coros. 2022 IROS.
打开封面
下载高清视频
观看高清视频
视频下载器
微小型管道机器人:实现亚厘米级管道探测|2022|清华大学【Science Robotics】
飞龙机器人:空中机器人实现了工业阀门操作|2022【東京大学】
软机器人学习爬行|2022【丰田工业大学芝加哥分校】
谷歌AutoRT:具身智能大模型机器人大型编队|2023【Google Deepmind】
半机器甲虫:像机器人一样被控制的真正昆虫|2016【南洋理工大学】
现代即插即用机器人模块|CES 2022【韩国现代】
开源动力机器人倡议:四足机器人Solo和双足机器人Bolt|2022【纽约大学&马普所&苏黎世联邦理工】
抓手机、透明试管、气球|指尖接近传感器机器人抓取|2021【日本大阪大学】
基于人体全身动态远程运动的双足机器人行走控制|2022【伊利诺伊大学厄巴纳-香槟分校】
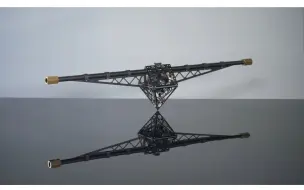
大型扑翼机器人:serenity演示及创造史|2021【俄罗斯Rarok-2】
Husky机器人监测南极企鹅种群|2022【Clearpath】
Ascento Pro专业版|2021【苏黎世联邦理工学院】
异种机器人Xenobots 3.0:构建全球首个自我复制的活体机器人|2021【佛蒙特大学&塔夫茨大学&哈佛大学】
两轮跳跃机器人「Ascento」2020【苏黎世联邦理工学院】
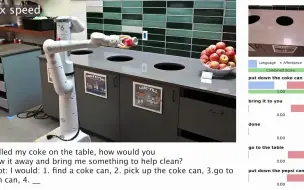
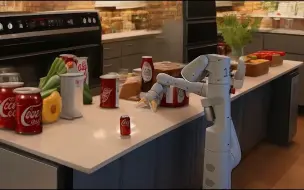
做我能做的,而不是我说的:机器人基础语言|2022【谷歌•机器人】
自动布肌肉纤维「软体机器人」|2020【迪士尼Disney】
触觉设备2.0演示:打乒乓和组装宜家椅子|2022【韩国科学技术高等研究院】
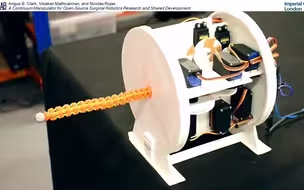
连续机械手-开源手术机器人研究|2021|帝国理工学院【T-MRB】
2023单轮立方体 VS 2013三轮立方体【苏黎世联邦理工学院】
农业采摘机器人|2023|Floating Robotics【苏黎世联邦理工学院】
🔥ANYmal Parkour跑酷:学会攀爬和跳跃|2023【苏黎世联邦理工学院&英伟达】
可打印的人造皮肤赋予机器人触觉|2022|Caltech加州理工【Science Robotics】
机器人通过力的物理交互同时重建物体及环境|2022【耶鲁大学】
全自动番茄剪枝机器人Kompano|2021【荷兰Priva】
瓢虫启发的折纸机器人|2020|韩国首尔大学【Science Robotics】
四足爬壁机器人-90度墙面、天花板倒立|2022|KAIST&美国伊利诺伊大学【Science Robotics】
超高速小型软体电磁机器人|2022【Nature Communications】
关节和肌肉运动可视化系统|2022【東京大学】
在256KB内存的STM32上训练神经网络|2022【MIT】
机器人奇异果收割机|2022【新西兰Robotics Plus】
人形机器人AI平台「Ameca」2021【英国Engineered Arts】
机器人学|2017|杨谷洋【台湾交通大学】
MyoSuite:统一神经和运动智能的具身AI平台|2022【Meta】
Ascento作为守夜人|2023【苏黎世联邦理工学院】
用语义想象经验扩展机器人学习|2023【Robotics at Google】
Flippy:一种软体自主攀爬机器人|2017【哈佛大学工程与应用科学学院】
Halluc IIχ:与自然环境共存的未来交通工具|2015|山中俊治【東京大学】
模块化自主复杂环境构建|2023【美国ExynAI】
骑自行车的机器人|2020|山口雅彦【日本】
强化学习多个对抗性运动先验的高级技能|2022【ETH Zürich】