V
主页
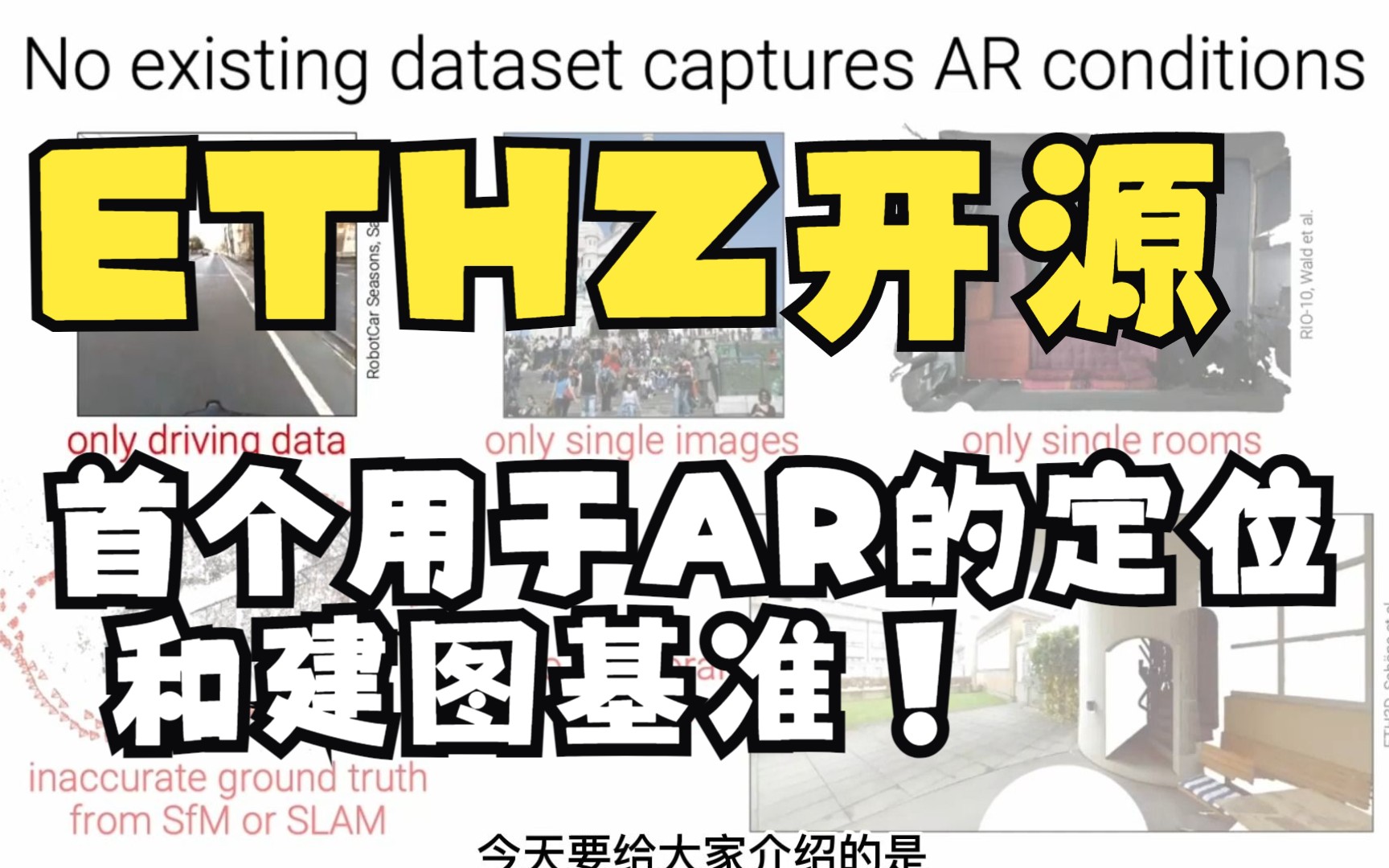
100+小时,45000m²的覆盖面积!首个用于AR的定位和建图基准!ETHZ等新开源,ECCV2022!
发布人
地面真值(GT)精度大多不足以满足AR要求。为了弥补这一差距,他们引入了LaMAR,这是一个新的基准测试,具有全面的捕获和GT管道,可在大型、无约束场景中共同注册由异构AR设备捕获的真实轨迹和传感器流。为了建立准确的GT,他们的方法以全自动的方式将轨迹与激光扫描进行牢固对齐。因此,他们发布了一个由头戴式和手持AR设备记录的各种大规模场景的基准数据集。他们扩展了几种最先进的方法,以利用AR特定的设置,并在他们的基准上对其进行评估。研究结果为当前的研究提供了新的见解,并为AR定位和制图领域的未来工作提供了有希望的途径。 项目主页:https://lamar.ethz.ch/ 论文地址:https://lamar.ethz.ch/files/LaMAR.pdf 代码地址:https://github.com/microsoft/lamar-benchmark
打开封面
下载高清视频
观看高清视频
视频下载器
ECCV2022|任意两帧之间均可插入,可实现27倍视频加速处理!旷视等最新开源
ECCV2022|视频风格自由变换!华中大等开源!
ETH、斯坦福与微软联合开源数据集!大几何和时间变化下的三维点云配准的时空基准
无需微调,即可进行场景特征匹配!CTU最新开源,ECCV2022
多视图头发编辑,可任意修改长度,适用于各种发型!波恩大学&CMU最新发布,ECCV2022
【最新开源】港科大开源倒金字塔多任务Transformer,首次用于场景理解的探索!ECCV2022
香港理工最新开源|实时LiDAR定位与Mesh建图,首个基于CPU的实时激光雷达SLAM系统!
IMU选型、标定误差分析、AHRS组合导航
用于自动驾驶的模拟器,可实时模拟复杂的驾驶情况!MIT开源!
波士顿动力机器人,要成精了!
TUM&MCML发布|系统提高39.7%,基于深度多视图立体匹配的实时稠密建图!
华盛顿大学与英伟达联合开源!用于大规模仿真环境和机器人运动控制
太厉害了 已跪!终于有人能把OpenCV图像处理讲的这么通俗易懂了,现在计算机视觉opencv全套分享给大家。
如何更高效学习GNSS、RTK定位?(含30+论文及两本电子书下载)!
【硬核课程】ORB-SLAM2重点梳理1:特征提取/匹配、图结构、地图初始化、跟踪、局部建图
【YOLOv5教程】花9888买的YOLOv5全套教程2024完整版现分享给大家!免费白嫖!值得收藏!——附赠课程与资料!——(人工智能、深度学习、机器学习)
太厉害了 已跪!终于有人能把OpenCV图像处理讲的这么通俗易懂了,现在计算机视觉opencv全套分享给大家。
哈工大、北师大、清华开源!逼真的3DGS人体化身
武大最新开源:GNSS/INS组合导航开源代码KF-GINS详解
我竟然40个小时就学会了基于PyTorch框架的自然语言处理,清华大佬从入门到实战带你吃透NLP,研零必备!
ECCV'24开源 | 拳打ORB3脚踢DROID!强化学习+VO=精度暴涨19%!
如何搞定真实数据?匹配的合成数据+跨模式表征学习即可!EPFL新开源,CVPR2022
强推!2024医学生必看的【人工智能+医疗】全套教程,教程从零开始,导师不教你的知识本课程统统告诉你,讲的非常全面!-人工智能/医学/计算机技术/计算机视觉
中科大新发布|轻量级神经路径规划,高效、低成本的机器人导航方法!
【直播回放】让机械臂自己学会6自由度抓取操控,代码已开源!
MIT发布|无需lidar和IMU之间的相对定位,即可提供高速率的里程计估计!
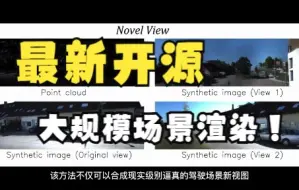
浙大最新开源|大规模场景渲染,用于自动驾驶3D场景!
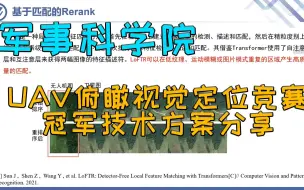
CMU & ICRA22 UAV俯瞰视觉定位竞赛冠军技术方案分享|军事科学院
AR界面也能操控无人机了,只需用手轻轻一碰
2024年最新清华大学公开课!【AI大模型LLM】精讲!清华大佬终于把AI大模型(LLM)讲清楚了!通俗易懂!(人工智能、神经网络、机器学习、图像处理)
皓月当空以秋月兮,伴万里而鹏程。计算机视觉life祝大家中秋快乐!
在家做AI,2月赚了一年生活费,分享我的实操方法,目前经济自由!!
【线下讲座】唐荣富:增强现实技术及应用
手把手教你学习标定基础知识
仅需3张图像即可合成逼真新视图,学习NeRF并优化相机姿态!ETHZ&Google等开源,CVPR2023
【yolov8】一小时掌握!从0开始搭建部署YOLOv8,环境安装+推理+自定义数据集搭建与训练,入门到精通!
【劝退】自学StableDiffusion能救一个是一个!这里面的水可深了!人工智能大佬专为零基础研制的StableDiffusion教学教程,太牛了!AI绘图
无外部设备下,可实现厘米级自主规避!港科大&大疆新开源!
手把手带你入门SLAM
上海交通大学博士分享基于神经隐式表征的语义SLAM(下)