V
主页
FAST2024:LLM领域的存储系统
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
字节万级GPU集群LLM训练
FAST2024最佳论文,十余年阿里云弹性块存储(EBS)演进
AI中需要的网络和存储技术
RISC-V Microprocessors
[APNEET2023] 超大规模RDMA:经验和未来方向
机器人学习中运动表示
可扩展且高效的大模型系统
Foundational Models for Robot Control
[SIGCOMM2023] : Offloading
机器人可达性研究
神经场在机器人操作中的应用
自适应协作机器人
Berkeley EECS研讨会讨论:Future of Robotics
凸集图规划
Mamba和S4解读:架构、并行扫描、内核融合、循环、卷积、数学
DéjàVu: 稀疏上下文的高效LLM推理服务
机器人空间感知基础
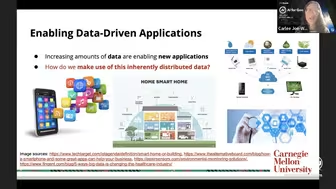
在线ML边缘侧应用
机器人中的数值方法
ASPLOS2024上LLM推理服务优化分享
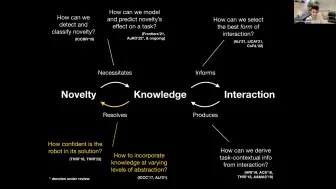
一种结构化方法来实现机器人学习泛化
Learning Abstractions from Humans
LLM与ROS(机器人操作系统)
通过扩散策略进行机器人灵活操作
Robotics in the Age of Generative AI
下一代机器人感知:3D场景图,可验证算法,自监督学习
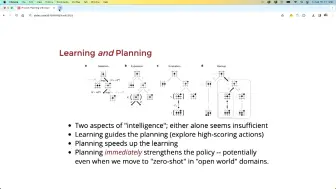
通过学习规划和感知进行任务和运动规划
如何在阿里云上创建自定义系统 - fnOS(飞牛 NAS)上云啦
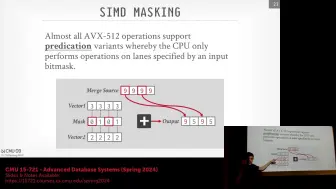
CMU数据库,使用SIMD执行向量化查询
数据金字塔结构管理机器人数据
MIT机器人操作Lecture 2
Iceberg中的流式计算
编译器的黄金时代
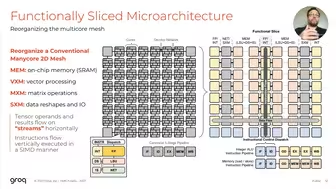
Groq张量流式处理器架构
LOTUS: 通过无监督技能发现进行机器人操作的连续模仿学习
apple部署及监控ML应用
Efficient Large Vision Models
凸集图及在最优控制和运动规划中应用
MuxServe:灵活的多路复用实现高效的多个LLM服务
[HOTI2023] Leveraging SmartNICs for HPC and Data Center Applications 2