V
主页
AI中需要的网络和存储技术
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
针对AI工作负载优化的存储架构
Munich AI 讲座: 机器人运动规划
可扩展且高效的大模型系统
[APNEET2023] 超大规模RDMA:经验和未来方向
Generative AI - The Future of Enterprise Software,LLM与未来企业服务
Mamba和S4解读:架构、并行扫描、内核融合、循环、卷积、数学
Robotics in the Age of Generative AI
[SIGCOMM2023] : Offloading
AI应用于经济学
【中字】为什么如今的一切都变得如此无聊?
KAN神经网络
凸集图规划
从物理互动中学习结构化世界模型
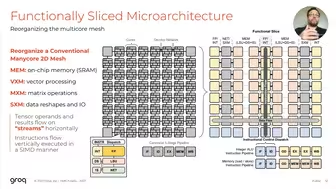
Groq张量流式处理器架构
通过扩散策略进行机器人灵活操作
可微轨迹优化作为强化和模仿学习的策略表示
机器人泛化学习
基于概率图重排的3D碰撞距离估计网络
NVIDIA Speech AI Day:语音AI从学术研究到商业应用
金融市场中生成式AI和多模态agents应用
Generative AI 前沿周报
人工智能研究方法及心得
行业视角看AI 机器人的发展
[NSDI2023] TopoOpt: 为DNN训练作业联合优化网络拓扑和并行化策略
最新Zuckerberg访谈,Llama 3.1, 开源,agents及安全等
机器人学习中的收缩理论
AI Safety, RLHF, and Self-Supervision - Jared Kaplan | Stanford MLSys #79
K8S在边缘端用于AI模型部署的演示
K8S中AI用例处理单元全景图
Torvalds Speaks:AI对编程的影响
Foundational Models for Robot Control
通过语言、逻辑和YouTube视频数据实现长期操作的可扩展机器人学习
Optimal Control (CMU 16-745) 2024 Lecture 19:卡尔曼滤波
GRASP on Robotics: 复杂网络的统一理论架构
通用医学图像分割
神经场在机器人操作中的应用
Efficient Large Vision Models
扩散生成视频
Insights from NVIDIA Research
HPC视角下的混合精度