V
主页
Raspberry Pi ROS geometryTwist controlled Robot
发布人
https://www.youtube.com/watch?v=6rQkUm_-dsU
打开封面
下载高清视频
观看高清视频
视频下载器
MITs Jammable Robot Manipulator
How to install tensorflowlastest version on Raspberry Pi
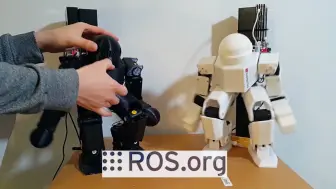
Dynamixel ROS motion capture robot using Raspberry pi and wifi_57Vo
NASA Mars Rover Curiosity in ROS and Gazebo
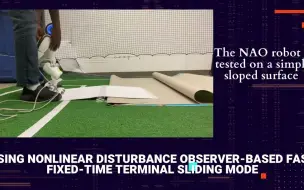
Walking Position Commanded NAO Robot
[开源]Moveit ROS Control Robot demo and Code details
微雪 树莓派Raspberry Pi Pico 2 RP2350双核微控制器python开发板套件
Gazebo中的板球平衡系统
ros+openai(5)基础1
乐高-球形机器人
Simplifying Simulation Worlds Creation for Gazebo with AWS RoboMaker WorldForge
MIT的变形机器人
turtlebot3 gazebo wheel slip
ROS+OpenAI(4-1)从零开始创建智能小车-建模
啥时候的机器人格斗赛,开场白能听到“咏春。Robot问”
D-Hand 複合四節リンク機構 | ダブル技研株式会社
Raspberry Pi show real time sensor data in a graph Python
Setting up Arduino lib in ROS & Arduino IDE
室外ROS 深夜调车,一鼓作寄
ROS+OpenAI(14)gazebo物理参数
你就让机器人干这个?
Bobble-Bot 介绍
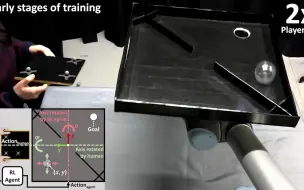
Real World Human Robot Collaborative Reinforcement Learning
也是玩上ROS了
灵巧协作机械臂/NaverLabs的AMBIDEX
ROS+OpenAI(8)基础4-动作
PyRoboLearn_ Kinematics
ROS+OpenAI(3-3)基于python3的DQN用于Cube机器人
树莓派+VNC+ubuntumate16.04
视觉组 | YOLO自瞄终于能打中了
7款 变形机器人
马里奥麦克纳姆轮小车及其室内视觉定位 【AI配音】
树莓派5锂电池供电电源,可给树莓派5正常供电,供电模块最高可输出11A大电流。满足全系列树莓派供电使用。供电模块自带USB Type-C电源线 可直接使用
Controlling Dynamixel with ROS_jdIo5hyAST0_1080p
如何使用电脑远程控制Raspberry Pi? xrdp 树莓派
PyRoboLearn_ Dynamics
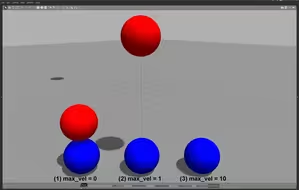
max vel parameters in ODE
ros+openai(3-2)tensorflow1
轮式机器人越障力学分析
min depth parameters in ODE