V
主页
ROS+OpenAI(8)基础4-动作
发布人
谢谢观看,如果觉得有用的话,不妨关注一下!(持续更新中)
打开封面
下载高清视频
观看高清视频
视频下载器
ros+openai(6)基础2
ros+openai(3-2)tensorflow1
ROS+OpenAI(3-3)基于python3的DQN用于Cube机器人
乐高-球形机器人
ROS+OpenAI(9)基础5-树莓派与虚拟机的ROS通信
ros+openai(2)虚拟机演示
ROS+OpenAI(11)基础7-tf2坐标变换与四元数
ROS多线程 与 Linux进程(2)
树莓派 3b ubuntumate 安装 ros
ROS+OpenAI(12)基础8-数据记录与导出
ros+openai(1)简介
Gazebo中的板球平衡系统
ROS2 QA 214 How to Install TurtleBot3 packages on ROS2
ROS+OPENAI(16)shell的简单使用
进化
Deploying ROS Node on Raspberry Pi
做的很棒的几款飞行机器人
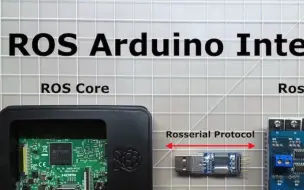
ROS Arduino tutorials _ ROS Arduino serial communication example - Part 1
ROS多线程 与 Linux进程(1)
搞懂滚动摩擦
ROS - Arduino serial basics
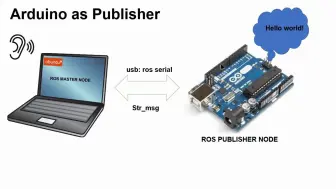
Integration of ROS and Arduino - #1
7款 变形机器人
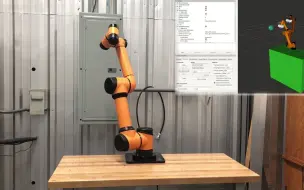
[开源]Moveit ROS Control Robot demo and Code details
ROS Arduino tutorials _ ROS Arduino serial communication example - Part 2
VR 手
Dynamixel Tutorial _ How to control the Dynamixel Ax12 Motor using
基于ros路径规划+避障演示
目前最帅的10款 机器狗
控制系统设计之动力系统建模2/6
非常强大的驱动器 RMDX10
ROS2-How to create a ROS2 package in C++ and Python
理解 【惯量】
C6-2智能车的建图与自主实现教程
能爬墙的遥控赛车,制作全过程
攀爬机车挑战赛
ITNG 2019 - An Architecture to Connect the Dynamixel AX-12A to the
1/12 雅马哈 YZF-R1M
强化学习 四足
自制 Nerf Toy