V
主页
ROS+OpenAI(14)gazebo物理参数
发布人
物理参数介绍的不是很细致。大家可以去以下网址查看: http://gazebosim.org/tutorials?tut=physics_params&cat=physics#Frictionparameters
打开封面
下载高清视频
观看高清视频
视频下载器
乐高-球形机器人
ROS+OpenAI(3-3)基于python3的DQN用于Cube机器人
ros+openai(3-2)tensorflow1
ROS+OpenAI(13)urdf进阶-xacro
Gazebo中的板球平衡系统
强化学习 四足
ROS+OpenAI(10)基础6-ROS时间
ROS多线程 与 Linux进程(2)
ros+openai(4)urdf快速了解
ROS Robotics Tutorials _ Robot Operating System
ros+openai(2)虚拟机演示
没有线的风筝,照样飞!!!
Dynamixel Tutorial _ How to control the Dynamixel Ax12 Motor using
ROS+OPENAI(4-4)多机器人简单示例
The Marathon 2_ A Navigation System (IROS 2020)
双陀螺自平衡自行车
Reinforcement Learning for Real-World Robots
A Reinforcement Learning-based Framework for 机器人技能
LBGP_ Learning Based Goal Planning for Autonomous Following
基于搭建的仿真Livox mid360雷达与仿真环境实现LeGO-LOAM
Bobble-Bot 介绍
NASA Mars Rover Curiosity in ROS and Gazebo
ROS+OpenAI(12)基础8-数据记录与导出
美国 DARPA 2020 机器人相关研究
PyRoboLearn_ Dynamics
进化
Setting up Arduino lib in ROS & Arduino IDE
CoRL 2020, Spotlight Talk 130_ Motion Planner Augmented RL
ROS - Arduino serial basics
OpenAI Baselines - Reinforcement Learning Agents!
摩托参数与性能介绍-非常棒的视频
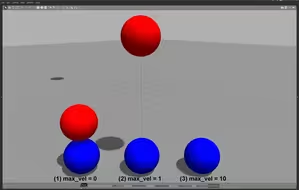
max vel parameters in ODE
如何快速低成本开展机器人项目
7款 变形机器人
How to connect the TB6612FNG Dual H-Bridge motor dirver to an Arduino and Raspbe
树莓派 3b ubuntumate 安装 ros
Flexure joints for large range of motion by Precision Engineering
ROS+OPENAI(16)shell的简单使用
两轮汽车的工作原理
[开源]Moveit ROS Control Robot demo and Code details