V
主页
实时最优控制讲座 —— 最优控制机器人软件
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
IROS 2023 讲座 —— 从基于模型的全身控制到利用 ML 进行足式人形机器人操作
MIT 机器人讲座 —— MuJoCo MPC (MJPC) 介绍
ETH + NVIDIA 研究 —— Orbit: 交互式机器人学习环境的统一仿真框架
实时最优控制讲座 —— Crocoddyl 教程
ETHZ 研究:RL + 基于模型的控制: 利用按需最优控制学习灵活四足运动
意大利 IIT 讲座 —— 结合学习和模型预测控制的机器人安全控制
斯坦福开源 - 机器人技能学习 通用接口UMI - 机械夹爪装配教程
佐治亚理工学院研究 —— 人体动捕训练四足机器人(类人动作,如打网球)
实时最优控制讲座 —— 改变接触条件下的轨迹优化
斯坦福大学开源 - 机器人技能学习 通用操作接口 UMI (Universal Manipulation Interface) Demo
ETH 讲座 —— 机器人的感知和学习:ML 最佳实践项目
顶尖院校联合开源 - 机器人操作数据集 —— DROID: 大规模机器人操作数据集
CMU 机器人讲座 —— 构建适应性强的通用机器人
实时最优控制讲座 —— OCS2 教程
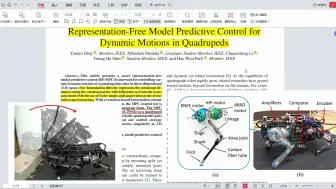
[复现]基于RF-MPC模型预测的四足机器人动态运动Matlab仿真
Decaying Action Priors for Accelerated Imitation Learning of Torque-Based Legged
CMU 机器人讲座 —— 面向大规模多智能体的智能规划(移动机器人,无人机)
UCSD 机器人讲座 —— 人形机器人的关键技术 + 基于模型 VS 学习的控制
沼泽小狗 机器狗 Ghost V60
斯坦福大学研究 - 用于机械手设计的动力学扩散模型
机器人逆运动学示例
USC 四足机器人研究 —— 通过 RL 增强 MPC 学习敏捷运动和敏捷行为
CoRL 机器人讲座 —— 通向通用机器人之路
开源人形机器人强化学习训练框架!星动纪元联合清华大学、上海期智研究院发布Humanoid-Gym!
2024 斯坦福 凸优化教程 Stephen Boyd 第一讲
IEEE 机器人讲座 —— MuJoCo MPC (MJPC)介绍
MATLAB - Robust Control(鲁棒控制) 官方出品
CMU 最优控制 2024 助教补充 第 5 讲 动态规划与 MPC
用 ROS 2 在 Isaac Sim 中驾驶自主移动机器人
dreamWaq复现尝试
宾大 GRASP 讲座 —— 机器人中的具身人工智能
ETH + Oxford 四足机器人研究 —— 野外视觉导航的快速可穿越性估计
EPFL 四足机器人研究 —— ManyQuadrupeds: 多种类四足机器人学习运动策略(ICRA 2024)
教程:使用 CVXPY 进行凸优化 - SciPy 2022
FAIR(Meta)机器人讲座 —— 机器人灵巧操作(Robotic Dexterous Manipulation)
慢放详解 舵机3D打印人形机械手
ETH研究 —— 利用纳米无人机群进行分布式测绘的全机载 SLAM
西北大学机器人讲座 —— 机器人学习的控制原理
未来有一天,这一幕将很快实现。人形机器人进入普通家庭的时代,快要来临了。
CMU 最优控制 2024 助教补充 第 7 讲