V
主页
北航、东京大学等发布CoR-GS!协同正则化3DGS,无真值评价重建质量!
发布人
3D高斯泼溅( 3DGS )创建了一个由3D高斯组成的辐射场来表示场景。在训练视图稀疏的情况下,3DGS容易出现过拟合现象,影响重建质量。本文提出了一种新的协同正则化视角来改进稀疏视角3DGS。在训练具有相同场景稀疏视图的两个三维高斯辐射场时,我们观察到这两个辐射场表现出点不一致和渲染不一致,可以无监督地预测重建质量,这源于致密化中的采样实现。我们进一步通过评估高斯点表示之间的配准和计算其渲染像素的差异来量化点不一致和渲染不一致。在研究的基础上,我们提出了CoR - GS,它根据两个不一致来识别和抑制不准确的重建:( i ) Co -剪枝考虑了在不准确位置上表现出高点不一致的高斯,并对其进行剪枝。( ii )伪视图协同正则化考虑了表现出高渲染不一致性的像素被不准确地渲染并抑制了不一致性。在LLFF、Mip - NeRF360、DTU和Blender数据集上的实验结果表明,CoR - GS有效地规则化了场景几何结构,重建了紧凑的表示,并在稀疏训练视图下获得了最新的视图合成质量。 文章名称:【CoR-GS: Sparse-View 3D Gaussian Splatting via Co-Regularization】 文章链接:http://arxiv.org/abs/2405.12110 项目主页: https://jiaw-z.github.io/CoR-GS/
打开封面
下载高清视频
观看高清视频
视频下载器
帝国理工学院最新工作!超基元场景重建,零样本深度补全
飞行技术专业选北航还是中飞院?
华盛顿大学与英伟达联合开源!用于大规模仿真环境和机器人运动控制
苏黎世大学发布!无需状态估计的视觉像素敏捷飞行
法国团队最新开源!3D高斯溅射可以生成三维网格啦!
南大、中科院、复旦联合发布!时空锚定的生成式4D高斯 横屏
襟,副翼,扰流板单侧失效,油箱不平衡着陆直布罗陀!
中科大新发布|轻量级神经路径规划,高效、低成本的机器人导航方法!
2024 北航录取通知书
加州大学开源!城市空间中具身智能的仿真平台
苏黎世大学Nature发布!用事件相机实现低延迟汽车视觉感知
上海航空空乘舌战乘客:等外国人是顺便的
ETH发布!轮腿式机器人的鲁棒自主导航与运动学习
【材子25小班课】北京航空航天大学911《材料综合》经验分享基热力学总结免费试听课程
从小县城到北京求学的这条路我走了23年在拿到通知书的时候我真切地意识到这一刻我终于站在了曾经幻想的所有时间线里!这一刻我好像原谅了曾经的很多遗憾终于圆梦啦!
【最新开源】ECCV2022|清华用单目RGB视频实现人体捕捉3D重建!
港大新发布|多会话模式,长期关联LiDAR-IMU里程计和建图!
即将开源!清华&北航&快手等研究DoubleField用于人体重建!CVPR2022
350km+的记录,cm级精度的数据集!用于自动驾驶的视觉长期定位!TUM开源!
华科、华为联合开源!实时动态场景4D高斯泼溅,最高 82fps!
北航录取通知书到手
TUM&港中大新发布|无需任何3D真值,通过2D监督学习3D场景优先级!CVPR2023
被油管网友称为最好的飞行频道,为何坠落?
三维重建进展:从传统到深度学习方法全面梳理(上)
空战训练仿真系统
港大等提出细铁丝网SLAM和三维重建!专治疑难杂症😎
加州大学搞定透明物体的三维重建,代码开源!
【即将开源】SIGGRAPH 2022|有玻璃场景的新视图合成,解决了物体的折反射问题,比NeRF更高清!MPII&DTU等新发布
武汉大学博士生分享算法面向室内SLAM场景的点云超分辨率算法(上)
UZH新发布|实现47.2%的平均精度,事件相机的RTV用于目标检测!CVPR2023
双目VIO+点线特征+抗动态光照! 南洋理工最新开源!
追踪一切?实现全局一致性的运动跟踪!康奈尔&Google等发布!
【六哥答疑】入门视觉SLAM,需要了解什么框架?
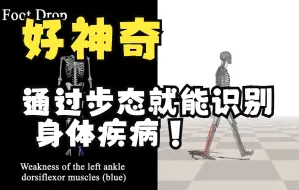
SIGGRAPH 2022|通过步态就能识别身体疾病,好神奇!
【开源】普林斯顿大学发布|端到端深度神经视觉DROID-SLAM,大大超越传统方法!支持单目、双目和RGB-D!
一曲《山楂树》纪念在北航的本科四年
无GPS下,即可在杂乱的森林环境中自主飞行!宾大开源!
ECCV22|ETHZ&Meta发布关键点NeRF,输入两张图像就可重建高保真的头像模型!
北航の录取通知书开箱
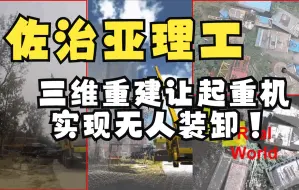
超有用!三维重建让起重机实现无人装卸!佐治亚理工!