V
主页
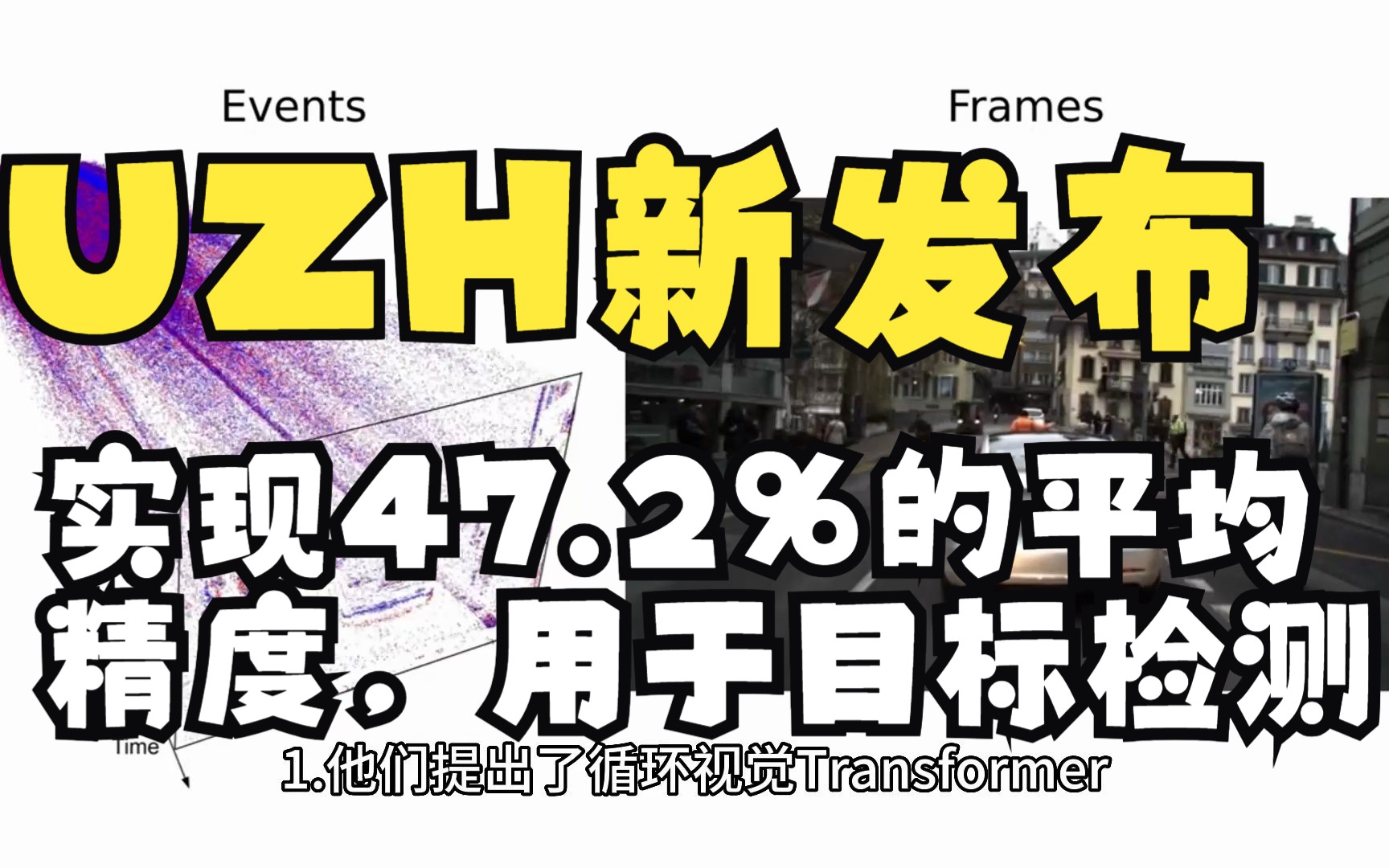
UZH新发布|实现47.2%的平均精度,事件相机的RTV用于目标检测!CVPR2023
发布人
我们提出了循环视觉Transformer(RVT),这是一种用于事件相机目标检测的新型骨干网络。事件相机以亚毫秒级的延迟、高动态范围和强大的抗运动模糊能力提供视觉信息。这些独特的属性为时关键场景中的低延迟目标检测和跟踪提供了巨大潜力。先前的事件相机视觉工作在检测性能上取得了出色的表现,但推理时间往往超过40毫秒。通过重新审视循环视觉骨干的高级设计,我们将推理时间缩短了6倍,同时保持了类似的性能。 论文地址:https://arxiv.org/abs/2212.05598
打开封面
下载高清视频
观看高清视频
视频下载器
全网最好的目标检测实战:基于PyTorch与YOLOv8实现的Android手机部署项目分享!全程通俗易懂,究极简单!
好真实!以独立视点、光照以及时间重建大型场景!浙大&康奈尔大学新发布, CVPR2023
这也太全了!图像处理、特征提取、目标检测、图像检索、图像分类、图像修复、图像分割、人脸识别、医疗影像等十大计算机视觉经典算法一口气学完!迪哥带你三天入门到精通!
港中大最新开源|2D秒变3D,基于2D场景风格化的光线配准!CVPR2023
短短2分钟内就能使用YOLOv10进行目标跟踪,只需要5行代码,你就可以在自己的项目里使用!小白也能轻松上手实验-人工智能、计算机视觉、目标检测。cv
太全了!六大深度学习目标检测算法!一口气带你学完:YOLO、SSD、FasterRCNN、FastRCNN、SPPNet、RCNN!真的通俗易懂!
【直播回放】用于3D激光雷达SLAM闭环检测的词袋模型 BoW3D
基于YOLOv10深度学习的草莓成熟度检测与识别系统【python源码+Pyqt5界面+数据集+训练代码】目标检测、人工智能
YOLOv5目标检测算法从环境搭建到训练自己数据集,2小时带你搞定YOLOv5目标检测算法,究极通俗易懂!(深度学习/计算机视觉)
立体匹配算法原理与应用-奥比中光
1.2 如何快速学习开源代码?
ETH发布!轮腿式机器人的鲁棒自主导航与运动学习
清华深研院、哈工深发布!Lidar视觉紧耦合实时相对定位
苏黎世皇家理工等发布!带闭环稠密神经SLAM
ECCV2022|任意两帧之间均可插入,可实现27倍视频加速处理!旷视等最新开源
成本降低2倍,用于提高视觉变换器的自适应令牌采样!微软等最新开源,ECCV2022!
基于Yolov5目标检测的DNF手游尝试_1
【目标检测】找不到创新点?看看北航这篇顶会论文是怎么做的?—附目标检测创新论文及源码
毫无痕迹?直接从3D场景中删除对象,NeRF中的3D修复!三星等新发布,CVPR2023!
学完可就业!超强CV方向实战—基于YOLO、OpenCV及Deeplab等算法实现工业缺陷检测,基础算法+代码复现
克服了局部极小值,用于估计6自由度目标姿态!英伟达最新发布!
西安交大&腾讯等|从局部到全局的逐帧配准,可应用于NeRF!CVPR2023
大量减少GPU内存需求,从2D图像生成完整3D体素语义!纽约大学&英伟达等开源, CVPR2023!
听起来高深莫测的SLAM技术到底是啥?SLAM技术简介及入门方法
波士顿动力机器人,要成精了!
四旋翼微型无人机 模仿猛禽捕猎,快速精准抓取目标!
AI交通目标检测与速度估计
100+小时,45000m²的覆盖面积!首个用于AR的定位和建图基准!ETHZ等新开源,ECCV2022!
入站必看!基于Pytorch的YOLOv5目标检测模型 环境部署+项目实战
带你读论文,超详细LOAM论文原文解读!
分辨率和精度是一回事吗
TUM&MCML发布|系统提高39.7%,基于深度多视图立体匹配的实时稠密建图!
UCLA发布|效率提高20%,可快速且并行逐点去斜的里程计!
【直播回放】SLAM常见面试问题浅析
武大最新开源:GNSS/INS组合导航开源代码KF-GINS详解
太厉害了 已跪!终于有人能把OpenCV图像处理讲的这么通俗易懂了,现在计算机视觉opencv全套分享给大家。
上海交通大学博士分享基于神经隐式表征的语义SLAM(下)
【最新开源】照片修复大师上线了,一键即可修复受损图片!南洋理工大学新研究,CVPR2022
MIT发布|无需lidar和IMU之间的相对定位,即可提供高速率的里程计估计!
浙大最新开源|大规模场景渲染,用于自动驾驶3D场景!