V
主页
港大新发布|多会话模式,长期关联LiDAR-IMU里程计和建图!
发布人
LTA-OM:一种高效、稳健且准确的SLAM系统。我们将FAST-LIO2、STD-LCD(闭环检测)、闭环优化和误报闭环拒绝集成到了LTA-OM中。我们提出了长期关联(LTA)映射,利用修正后的历史地图为LIO映射过程提供直接的全局约束,从而实现了良好的全局地图一致性。我们还实现了多会话模式,该模式提供了一致的地图拼接性能。在与现有SLAM系统的基准实验中,LTA-OM在准确性、地图一致性和效率方面表现出色。它适用于多线激光雷达(360度视场)和固态激光雷达(小视场)。
打开封面
下载高清视频
观看高清视频
视频下载器
香港理工最新开源|实时LiDAR定位与Mesh建图,首个基于CPU的实时激光雷达SLAM系统!
MIT发布|无需lidar和IMU之间的相对定位,即可提供高速率的里程计估计!
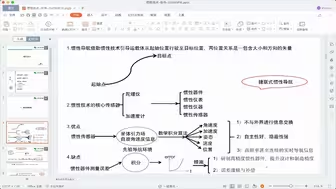
IMU选型、标定误差分析、AHRS组合导航
嵌入式linux项目,复刻IPhone相机测距功能 ,单目相机+IMU,Vins-mono slam,应用开发,驱动,RK3568,AR
港大VS港科广Offer二选一
牛津大学|这个IMU+四个相机的视觉惯性里程计真不错!漂移率降低80%、相对位姿误差降低39%!
港大学生心中排名前三的大学
UCLA发布|效率提高20%,可快速且并行逐点去斜的里程计!
【硬核课程】ORB-SLAM2重点梳理1:特征提取/匹配、图结构、地图初始化、跟踪、局部建图
上海交通大学博士分享基于神经隐式表征的语义SLAM(下)
浙大章国峰团队发布CP-SLAM: 协同基于神经点的SLAM
TUM&MCML发布|系统提高39.7%,基于深度多视图立体匹配的实时稠密建图!
IROS22|动态环境下,资源受限机器人的惯性里程计!哈工大最新开源!
立体匹配算法原理与应用-奥比中光
TRLO: An Efficient LiDAR Odometry with 3D Dynamic Object Tracking and Removal
【直播回放】学习大礼包
拿港大毕业证只需要这样做!无痛留学香港?HKU香港大学暑校就读体验(下)收官篇
《松灵ROS 2开讲啦》第五期 ROS 2中常用的SLAM建图方法
VIOBOT 【性能测试——高精度】
港大毕业生,毕业后都去哪里?
多地图的作用和效果_7.2
手把手带你入门SLAM
CMU & ICRA22 UAV俯瞰视觉定位竞赛冠军技术方案分享|军事科学院
【直播回放】SLAM学习入门经验分享
100+小时,45000m²的覆盖面积!首个用于AR的定位和建图基准!ETHZ等新开源,ECCV2022!
【直播回放】SLAMesh:实时LiDAR定位与Mesh建图
香港大学开源FAST-LIO简介,对比及学习方法(附详细解读文档!)
ICRA2022|最小化成本,无特征环境下仍能估计轨迹!全局一致和紧耦合的3D激光惯性建图!
瑞典皇家理工博士分享开源算法: 点云地图动态障碍物去除基准
【SLAM前沿讲座】Tim Barfoot |机器学习在哪里可以帮助机器人进行状态估计?
无需微调,即可进行场景特征匹配!CTU最新开源,ECCV2022
【入门必看】视觉惯性SLAM“灭霸”:ORB-SLAM3
教你如何学习SLAM传感器及算法部署,新手必看!
【直播回放】SLAM常见面试问题浅析
ETHZ最新发布X-ICP 极端环境下鲁棒的激光雷达配准
【SLAM前沿讲座】佐治亚理工|用于感知和行动的因子图
SLAM知识星球直播答疑及抽奖
最后一次在hku练辣 122kg引体
仅需一张图片和音频,一键即可控制说话风格!清华最新发布,AAAI2023!
【直播回放】视觉惯性SLAM系统理论与实践(上)