V
主页
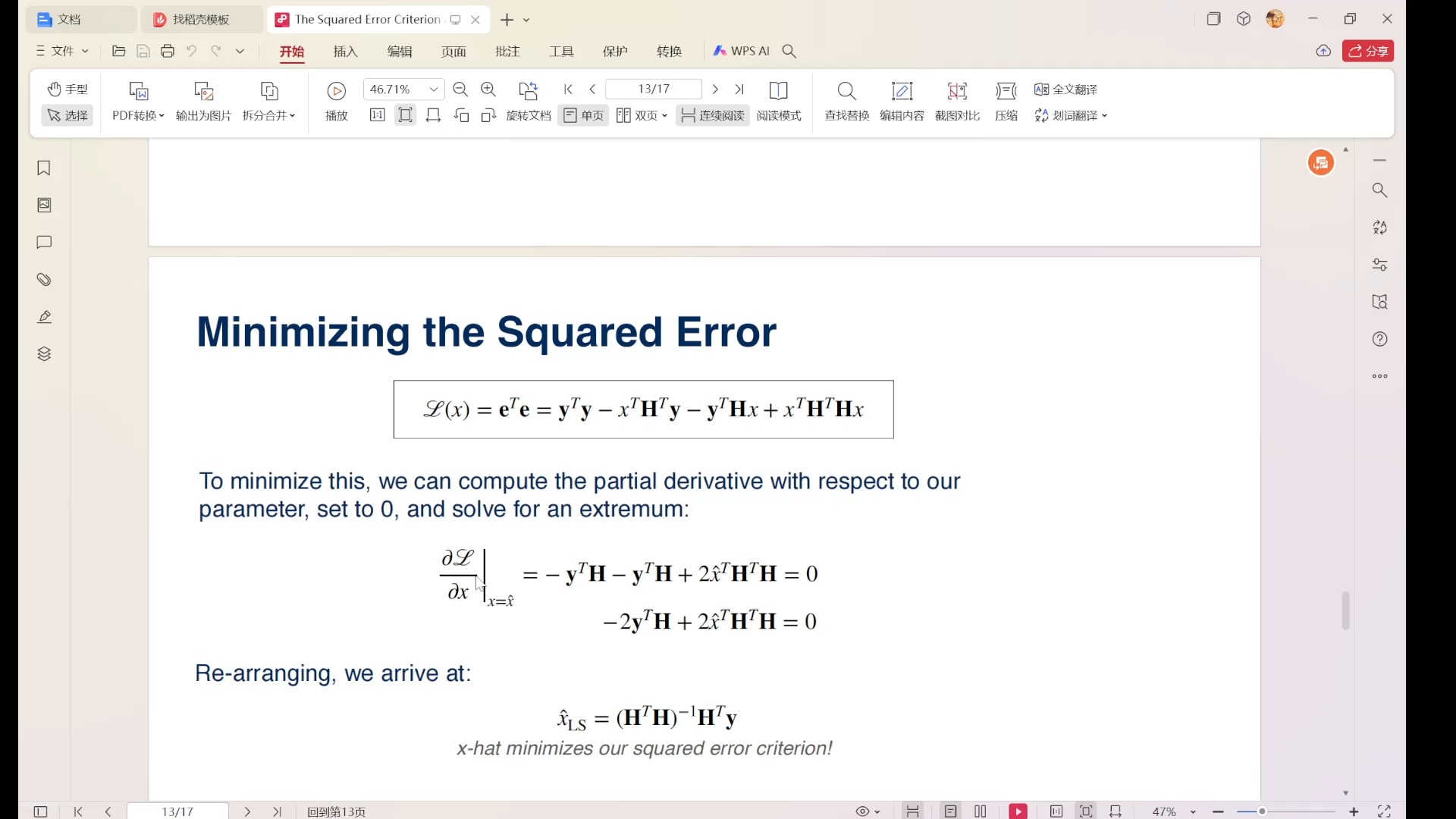
【多伦多大学—自动驾驶课程】状态估计与定位(最小二乘法):1谷神星的发现与最小二乘法
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
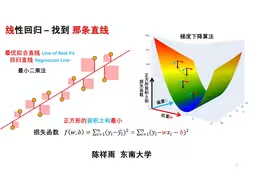
通俗统计学原理入门 28 线性回归 找到那条直线 回归直线 最优拟合直线 最小二乘法 梯度下降算法 损失函数 权重 偏置
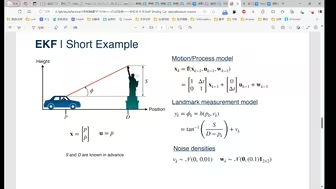
【多伦多大学—自动驾驶课程】状态估计与定位(卡尔曼滤波3):雅可比矩阵,扩展卡尔曼滤波EKF, 示例
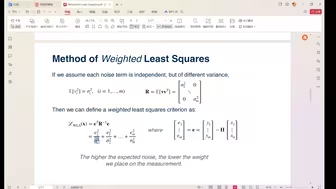
【多伦多大学—自动驾驶课程】状态估计与定位(最小二乘法):2. 加权最小二乘
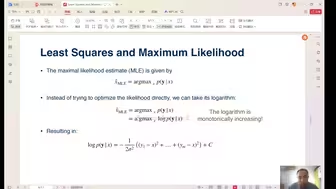
【多伦多大学—自动驾驶课程】状态估计与定位(最小二乘法):4最小二乘与最大似然
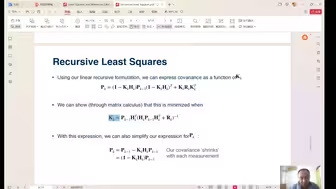
【多伦多大学—自动驾驶课程】状态估计与定位(最小二乘法):3递归最小二乘法
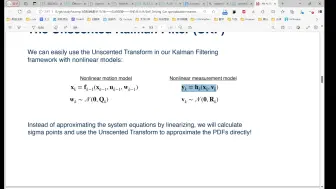
【多伦多大学—自动驾驶课程】状态估计与定位(卡尔曼滤波6):无迹卡尔曼滤波UKF
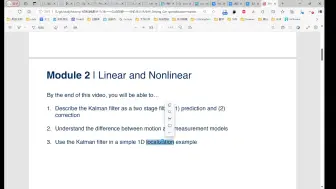
【多伦多大学—自动驾驶课程】状态估计与定位(卡尔曼滤波1):算法原理,示例
【多伦多大学—自动驾驶课程】状态估计与定位(卡尔曼滤波5):EKF的局限性
多伦多大学读书 一年要花多少钱?
大模型时代下的端到端自动驾驶(上篇)
体验美国无人出租车,真的能取代司机?
去加拿大留学有什么好处?
浙大Fast-Lab高飞老师 详解第二届ARTS 自主机器人技术研讨会
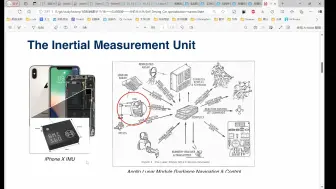
【多伦多大学—自动驾驶课程】GPS和INS系统2:IMU中的陀螺仪和加速度计
自动驾驶入门技术全栈实战解析-1-感知篇
Yolov8源码解析(一):网络结构解析
1高维向量表示与矩阵乘法
【自学用】多伦多大学--微积分(证明)MAT137 Calculus with Proofs
小米su7max全国NOA智驾,三分钟不到差点撞墙,太危险了!
自动驾驶时代即将来临⚡️
【MIT的模型压缩与8.2并行计算与推理优化——推理优化的4种技巧:Im2Col/In-place DWConv/NHWC与NCHW/Winograd Conv
【德国图宾根大学-自动驾驶课程】道路分割与车道检测——2道路分割
拆解理想L9自动驾驶控制器。整车产品虽好,但是自动驾驶控制器可靠性不高!
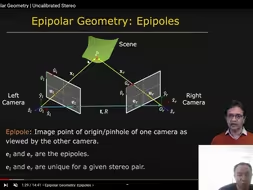
【哥伦比亚大学CV课程】012未校正的立体视觉——2对极几何约束
普高想去加拿大规划本科留学
开源!基于RRT*的路径规划算法(ROS C++/Python/Matlab实现)
水平集_杜克大学(中文讲解版)
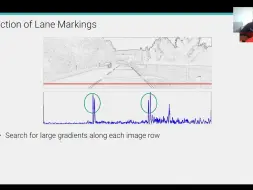
【德国图宾根大学-自动驾驶课程】道路分割与车道检测——3车道线标志检测:IPM算法,Ransac算法
【Dr. Tea】1-HOUR STUDY WITH ME|多伦多大学一起学习|Lofi Jazz|带倒计时+闹钟
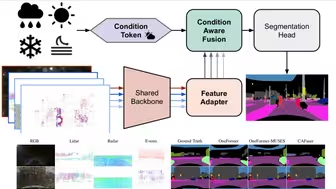
ETH新作CAFuser:条件 感知多模态融合 ,实现对 驾驶场景的稳健语义感知,多个下游任务SOTA!
轨迹优化|矩形增量膨胀安全走廊构建算法(附ROS C++/Python实现)
民办二本均分3.2,申到WUSTL
Mobileye城市NOP:礼让行人
华为智驾牛掰的秘诀,竟然只是啥都自己做?
啥样人能申请到北美phd?需要达到什么强度?
【德国图宾根大学-自动驾驶课程】里程计与SLAM——2VO:间接法与小孔成像原理
【德国图宾根大学-自动驾驶课程】自动驾驶的历史
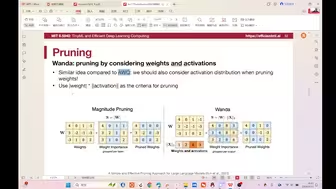
【MIT的模型压缩与优化课程】12.4Transformer和LLM——LLM的剪枝: Wanda/SpAtten/H2O/MoE
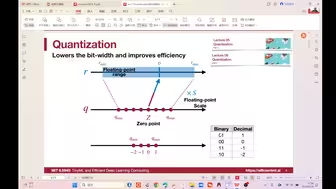
【MIT的模型压缩与优化课程】12.3Transformer和LLM——LLM的量化:SmoothQuant和AWQ
今天M9智驾自己进服务区,还真见证了一次“AI成精”。也不知道哪个神经元啥时候学会了啥