V
主页
全程干货【六轴机械臂正逆解计算及仿真示例】
发布人
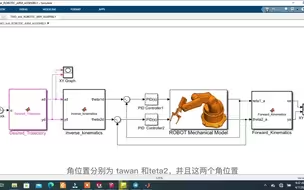
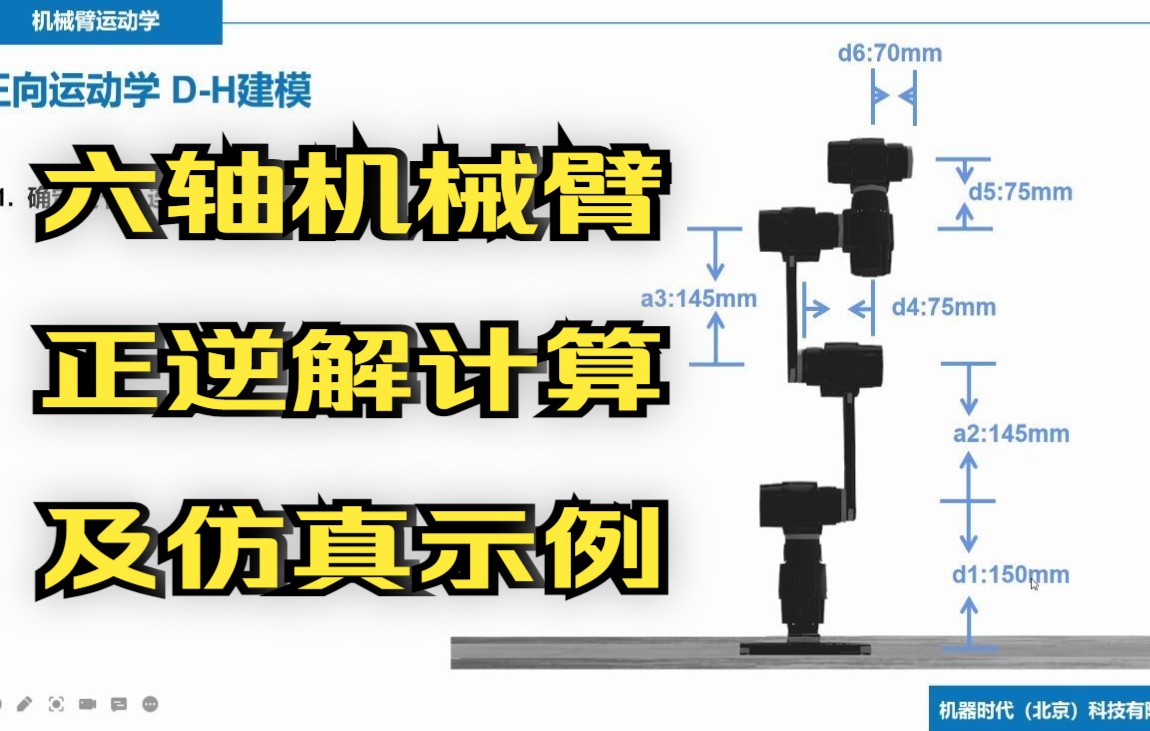
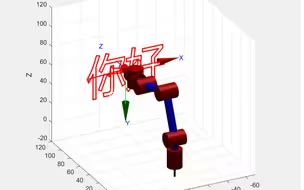
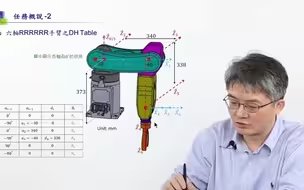
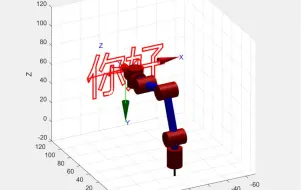
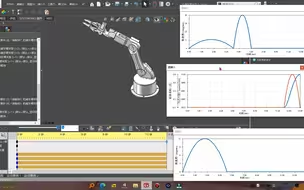
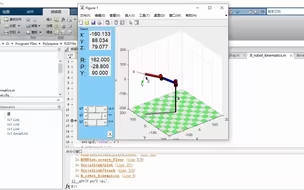
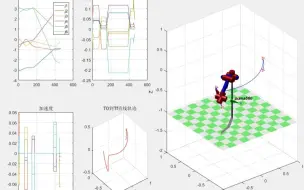
六轴机械臂正逆解计算及仿真示例 直播回放 直播大纲: 1、机械臂运动学介绍 2、正运动学及D-H建模 3、正运动学的仿真构建 4、逆运动学的结算思路 5、逆运动学的仿真构建
打开封面
下载高清视频
观看高清视频
视频下载器
MATLAB六轴机器人运动仿真学习记录
六自由度机械臂正逆解分析及写汉字仿真(一)
六自由度机械臂讲解(含DH模型与正逆运动学讲解)
【机械臂入门教程】机械臂视觉抓取从理论到实战
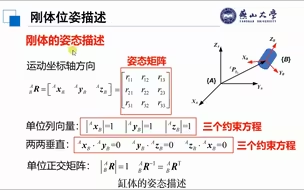
机器人学 | 2.1 机械臂的位姿描述(重点为旋转矩阵)
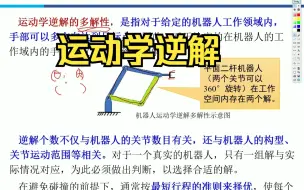
5. 机械臂运动学逆解
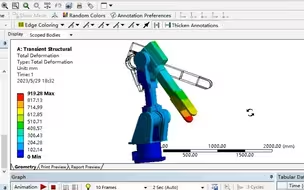
机械臂有限元分析ansys
【古月居】ROS机械臂开发:从入门到实战
8. 机械臂轨迹规划实例
手把手教你机械臂UG仿真
MATLAB机械手臂运动控制仿真+PID+GUI 教程一(机械手臂建模)
【全开源】机械臂控制、数字孪生、正逆解项目教程,代码 结构 APP Unity工程全开源!!!
SolidWorks教程 - 4自由度机械臂
7.Moveit!机械臂控制
Solidworks 画三维机械手臂
机器人操作系统 ROS 快速入门教程
ABB工业机器人编程基础(基于RobotStudio6.08)(已完结)
【小白日记】从0做一个简单的虚拟机械臂
六自由度机械臂正逆解分析及写汉字仿真(二)
Python+ESP32 4988 机械臂 PyQt上位机 开源 配套课件(更新中)
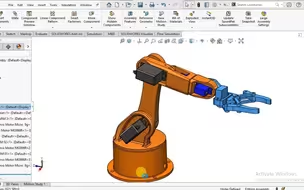
SolidWorks处理step文件做动画以及motion仿真(机械臂)
机器人学 机器人技术 期末复习(涵盖机器人运动学和机器人动力学部分)
机械臂研究入门必看流程!URDF导入|仿真平台|运动规划|运动学
机器人 运动学 D-H经典方法和改进D-H方法参数表建立
二连杆机械臂动力学(使用雅克比Jacobian矩阵)
matlab 机器人 运动学 正逆运动学 轨迹规划 出图
机械臂运动学求解
机器人运动学-逆运动学
一起用Matlab从零手写六轴机械臂正逆解和轨迹规划
3-12运动学逆解示例:PUMA560
【机器人控制】基于模型不确定补偿的 RBF 网络双机械臂自适应控制
机械臂大作战公开课:运动学计算!含 SOLIDWORKS 高级配合、配合控制器、传感器知识!
用Solidworks对机械臂进行建模并用simscape插件将模型导入到MATLAB中进行仿真
六轴机械臂工作原理和装配
【Autolabor初级教程】ROS机器人入门
3-11运动学逆解
SolidWorks机械手建模教程
六轴机械臂设计,全参数化可编辑,零件都有工程图设计?
基于YOLO的机械臂抓取(三)——手眼标定
听得懂人话、看得懂图像、指哪打哪的机械臂是怎么炼成的