V
主页
【机器人控制】基于模型不确定补偿的 RBF 网络双机械臂自适应控制
发布人
机器人控制 | RBF network | C reference: [1] 刘金琨,机器人控制系统的设计与Matlab仿真,北京:清华大学出版社 [2] https://github.com/weichaoliu7/adaptive-RBF-control-for-double-manipulator
打开封面
下载高清视频
观看高清视频
视频下载器
【机器人控制】模糊模型参考自适应控制
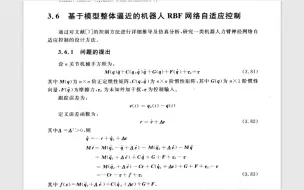
【机器人控制】基于模型整体逼近的机械臂 RBF 网络自适应控制
【机器人控制】基于模型不确定补偿的 RBF 网络单机械臂自适应控制
【机器人控制】机器人机械臂任务空间自适应神经网络控制
【自适应控制】极点配置自校正PID控制算法理论及其Matlab实现
【系统辨识与自适应控制】模型参考自适应控制(MIT-MRAC)理论及其MATLAB实现
【模糊控制】模糊PID控制及其MATLAB仿真_苏明
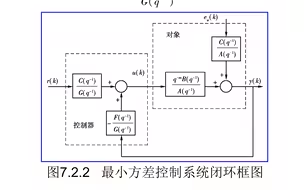
【自适应控制】最小方差控制(MVC)算法的 Matlab 实现
【论文复现】移动机械臂协同控制(十) Gazebo无重力补偿
【机器人控制】机械臂独立PD控制
【自适应控制】最小方差控制(MVC)算法公式推导
【机器人控制】参数扰动和外部扰动下机器人系统非线性H_infty控制
01-机械臂算法和ROS设置
【全局优化】基于成功历史的自适应差分进化算法(SHADE)
【进化算法】差分进化(DE)算法及其Python实现
【模糊控制】两轮倒立摆小车的间接自适应模糊控制
机械臂仿真环境自动识别抓取
【模糊控制】基于模糊逻辑的智能交通信号灯控制
【论文复现】移动机械臂协同控制(二)——机械臂动态避障
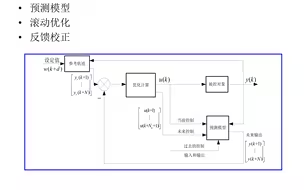
【模型预测控制】广义预测控制(GPC)算法及其MATLAB实现
【优化算法】基于模拟退火(SA)算法的车辆路径(VRP)问题求解
【自适应控制】广义最小方差控制(GMVC)算法理论及其Matlab实现
【机器人控制】基于模型分块逼近的机械臂 RBF 网络自适应控制
六轴机械臂控制器---姿态及轨迹控制功能Python函数库
Sepanta_AUT麦克纳姆轮机械臂小车3D图纸
【优化算法】基于参考点的非支配排序遗传算法NSGA-III的Python实现
【IROS2024】机器人移动操作
【全局优化】灰狼优化算法
【进化算法】非支配性排序遗传算法II(NSGA-II)原理及其Python实现
【组合优化】应用遗传算法求解带容量约束的车辆路径问题(CVRP)
【自制】做了一台ROS视觉辅助机械臂
【全面量产】超小型RV减速器及一体化伺服驱动关节
【多目标优化】基于参考点的非支配性排序遗传算法(NSGA-III)C++实现
【遗传算法】应用遗传算法求解流水车间调度问题(flow shop scheduling problem)
【自适应控制】小型无人驾驶飞行器自动驾驶仪的参数自校正
俺回宿舍睡觉了!让机器人自己做化学实验去~
【系统辨识与自适应控制】批量最小二乘法(LS)理论及其MATLAB实现
【车间调度】一种求解柔性作业车间调度问题的高效遗传算法
毕业设计:机械臂数字孪生
新型大中空零背隙关节减速器-七轴机械臂、六轴机械臂活动范围测试