V
主页
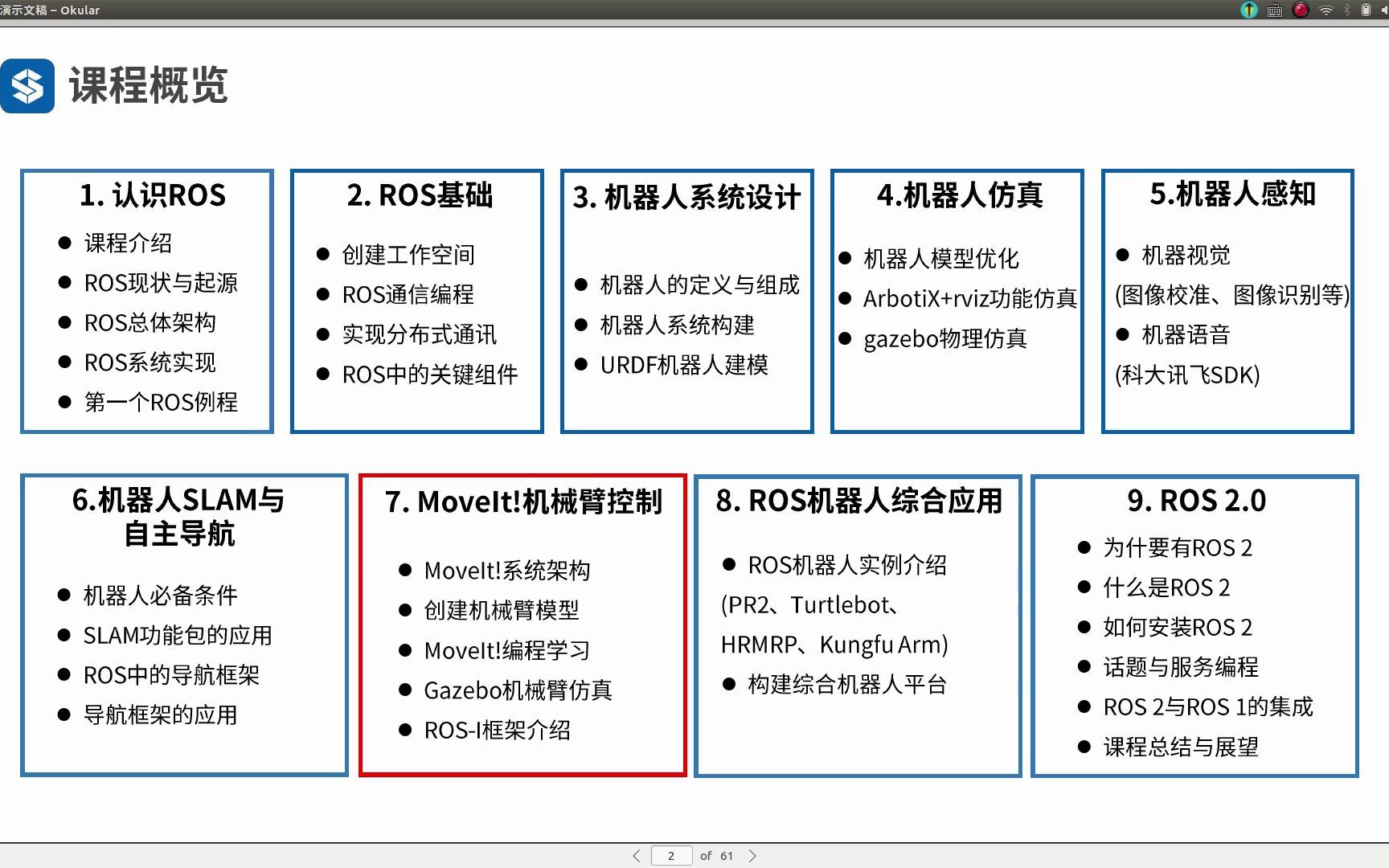
7.Moveit!机械臂控制
发布人
该视频为古月大神的ROS教程,上传B站,方便自学使用,如有侵权,请联系删除。
打开封面
下载高清视频
观看高清视频
视频下载器
MoveIt!设置助手机械臂配置
【古月居】ROS机械臂开发:从入门到实战
ros2实现自定义机械臂模型的moveit2和gazebo的联动
初学ROS的MoveIt控制真实机械臂
MoveIt! ROS Tutorials (100% Practice)
ROS Moveit机械臂仿真
1.认识ROS
moveit!六自由度机械臂,arduino作底层控制器
ROS2视频教程之运动规划库MoveIt使用的教程
7ROS理论与实践_.Moveit!机械臂控制_视频
动手学Moveit2:使用键盘控制机械臂
【ROS机械臂入门教程】第6讲-Moveit基础(python)
MoveIt!控制真实机械臂运动规划【ROS机械臂开发】
ROS2+MoveIt2四自由度机械臂运动规划
3.机器人系统设计
5.机器人感知
【古月居】ROS机械臂开发原理
ROS Moveit桌面机械臂进阶视频教程(一)|Urdf标签讲解
NanoArm六轴ROS机械臂使用教程
移动机器人和机械臂复合的智能机器人开发与实践
ROS导航例程运行
遨博机械臂ROS melodic开发环境部署
基于ROS的六轴机械臂控制
MALTAB六轴机器人运动仿真
Moveit官方介绍视频
【ROS机械臂入门教程】第8讲-运动规划-如何选择Moveit中的规划算法?
6DoF + PointnetGPD + Moveit + ROS机械臂的自主抓取
【ROS机械臂入门教程】第3讲-机器人URDF建模
基于Moveit的双机械臂物理空间安全规划
moveit+gazebo联合仿真
4.机器人仿真
【ROS机械臂入门教程】第2讲-从机械臂视角看ROS
使用键盘调用MoveIt接口控制ur10机械臂(仿真和实机均可)
《 MoveIt运动控制来了! 在抓取仿真平台上代码驱动UR抓取绝不止于想象!》
【ROS】Moveit!3D环境感知功能实际操作,配合fanuc机械臂
【ROS机械臂入门教程】第11讲-基于ROS-Moveit实现6-DOF视觉抓取
【moveit开源+超简单】双臂机器人抓取物块实验
ROS机械臂教程《如何基于MoveIt开发一款机械臂》
【ROS机械臂入门教程】第7讲-Moveit基础(C++) 实现带约束的路径规划
moveit2教程~第一个c++工程