V
主页
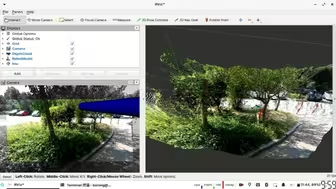
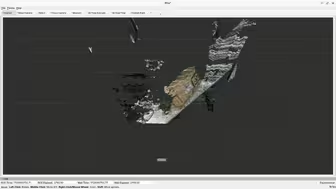
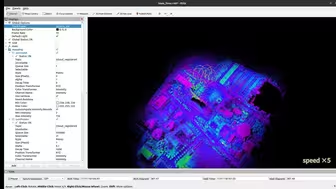
在RTAB-Map中为OAK相机增加了Color+Depth模式(仅限特定型号)
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
告别词袋模型,也无需GPU,VSLAM的完美边缘计算解决方案,现已加入RTAB-Map大礼包
RTAB-Map+OpenVINS+OAK-SuperPoint
谁说跑VSLAM就得小心翼翼?我们的VIO鲁棒性爆表,放心用,还有200 Hz的高帧率定位输出
要啥激光雷达,Factor Perception SDK夜间纯视觉SLAM演示
RTAB-Map傍晚及夜间长距离Demo
最近对VIO的鲁棒性有了一些新的理解
要啥激光雷达,2D、2.5D、3D地图我全都有,Factor Perception SDK纯视觉SLAM地图数据展示
告别SGBM,在最便宜的OAK相机上跑最强的双目深度模型
把双目相机当ToF用?未尝不可!看看神经网络的双目视差估计能力
11月15日组会:RTG-SLAM: Real-time 3D Reconstruction at Scale Using Gaussian Splatting
一个没啥特点的工程化激光slam(某二线城市的“大型”地铁站)
比啃书高效多了!清华高翔博士亲授【视觉SLAM十四讲】视频教程全集,一起来体验醍醐灌顶的感觉!
新模型加持,OAK深度相机的室外点云质量有多好?
完全自学!跟着老师一周学会【机器视觉Halcon】从入门到实战!多套实战项目!含配套课程资源~计算机视觉、CV、人工智能、图像处理 【转载/侵删】Z0003
【SLAM】【VIO】室内狭窄空间.三维重建【空间计算】
世界上首例AI杀人事件发生了?
无人机SLAM入门教程(一):课程概述1.1 SLAM基础概念
小小的调试一下
弱光环境下的SLAM系统
【机器视觉-Halcon】手眼标动+工业相机采集图像教程-全网首发 附源码快速上手【转载】【侵删】(C#/视觉教程/实战/编程/小白)Z0009
OAK相机深度数据质量不好?可能是你打开的方式不对
使用Isaac对Orin NX进行硬件在环测试(视觉SLAM)
GPS+IMU+3D激光建图
PEGG-Net Isaac Sim Demo
基于Gazebo的无人车激光SLAM建图与导航仿真
无人机SLAM入门教程(一):课程概述1.2 预备知识概览
机器视觉还有搞头吗?搞不动了啊。出货量好少。
摆盘机机器视觉
无人机SLAM入门教程(一):课程概述1.5 内容整理复习
机器视觉
无人机搭载livox avia采集点云数据,rosbag记录数据,FAST-LIO建图
Go2开发教学10-SLAM 导航服务接口
上位机开发、机器视觉、深度学习开发 专业技术路线图发布~~~~~~
OAK相机的SLAM建图
【SLAM-2024】第五届全国SLAM技术论坛-上海交通大学-卢策吾-具身智能的PIE模式研究
A-LOAM和LeGo-LOAM的SLAM对比,使用Kitti数据集odometry的05序列
IROS'24开源 | 全新动态V3D-SLAM:3D语义几何投票的动态鲁棒RGB-D SLAM
“定制化体验,无限可能:人形机器人的个性化功能展示”
工业机器人与基恩士视觉项目实战
机器视觉开发软件,到底该怎么选?(第二期)