V
主页
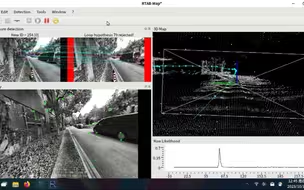
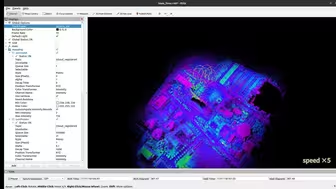
要啥激光雷达,2D、2.5D、3D地图我全都有,Factor Perception SDK纯视觉SLAM地图数据展示
发布人
我们明白视觉SLAM产品不应只提供定位功能,还需要强大的空间感知能力以支持各种下游任务。因此我们在开发Factor Perception SDK的同时也在积极参与RTAB-Map贡献,基于RTAB-Map后端提供对各种应用的支持。在地图数据方面,移动机器人开发者此前常使用2D激光雷达构建2D地图(OccupancyGrid),而无人机开发者则需要3D地图(Octomap),腿足式机器人一般使用2.5D地图(grid_map),在平面地图的基础上加上了高程信息。现在我们只使用OAK相机就可以输出以上所有类型的地图,这些数据严格遵循ROS规范。如果开发者此前使用GMapping、Cartographer、slam_tooblx、AMCL、OctoMap等框架,都可以无缝替换成Factor Perception SDK,几乎没有什么工作量。我们后续将不断完善地图数据质量并优化性能。同时我们也在开发一种新的地图表征,以同时支持回环检测、语义融合、实时三维重建等特性,敬请期待。
打开封面
下载高清视频
观看高清视频
视频下载器
坐过山车研究SLAM是一种怎样的体验?创极速光轮测试
谁说跑VSLAM就得小心翼翼?我们的VIO鲁棒性爆表,放心用,还有200 Hz的高帧率定位输出
最强室外深度相机OAK-D LR!给坚持纯视觉路线的伙伴们更多信心!
天才中单体验德国女大学生开学的一天
RoboMaster AWARD 2024 获奖人 奖杯开箱
一个没啥特点的工程化激光slam(某二线城市的“大型”地铁站)
外网真实评论:工厂内对宇树科技Go1机器狗进行大规模测试
宽基线双目深度相机在室外表现如何?神经网络和传统SGBM哪个效果更好?
尔等须防范憎恶智能
弱小可爱移动工厂惨遭四个飞鹰姐姐活活舔死
多摄像头多地图视觉惯性定位系统 (VILO):实时精准定位方案
8. SLAM系统-上 北邮教授深入浅出三维视觉技术(全网质量最高)
清华团队首次发现具身智能Scaling Laws:从 ChatGPT 到机器人的制胜法则
神经网络称霸流体力学湍流模拟
5只机器人组队进厂 担任不同零部件的搬运工 网友:5年后我将失业
【熟肉】当人工智能遇到50年代科幻片
Cartographer 算法论文《Real-Time Loop Closure in 2D LIDAR SLAM》精读 激光SLAM算法
【24工创省赛】2.40s超速完赛,那些关于赛场、调试和我们
中国机器人回家视频火到了国外
RTAB-Map+OpenVINS+OAK-SuperPoint
使用Isaac对Orin NX进行硬件在环测试(视觉SLAM)
中国制造 | 全球首款 | 可以组合变形的 | 双轮足机器人 | 来自本末科技
6轴机械臂运动学正逆解验证程序,三连留邮箱
如何用706.9元做一个高精度的机械臂?
第五届SLAM论坛高飞报告
无人机搭载livox avia采集点云数据,rosbag记录数据,FAST-LIO建图
我,仿真?速成,果真!机器人仿真,从Solidworks到ROS2
IME-UnMST: 协同地图构建
基于Gazebo的无人车激光SLAM建图与导航仿真
OAK相机的SLAM建图
每个开发者都需要一块树莓派
45岁老ip的含金量 光设定集就比新番剧本还厚
OAK相机深度数据质量不好?可能是你打开的方式不对
在RTAB-Map中为OAK相机增加了Color+Depth模式(仅限特定型号)
之前应该从未有人在3D显示器里玩过强化学习吧
幽默第83天,2021年禁止发展杀手机器人,国外反对,中国,好,一言为定
机器人大逃离 人工智能拐人工智障 一拐十二战绩可查
弱光环境下的SLAM系统
我的2024机创仿生蝴蝶
在OAK相机上跑SuperPoint