V
主页
03_路径发布节点解读-3
发布人
欢迎大家点赞,收藏,关注,投币! 代码注释版和改进版本链接:https://github.com/SnailTech07709/ME5413_Planning_Project.git
打开封面
下载高清视频
观看高清视频
视频下载器
03_路径发布节点解读-2
01_案例展示
基于地形的路径规划案例
03_路径发布节点解读-1
[强化学习]自动驾驶路径规划与控制-DQN/DDPG+pure pursuit路径跟踪实现
罗技G923联合carla仿真
04_PID改进讲解-1
[ROS简介]一句话说清楚什么是ROS!
自动驾驶路径规划与控制-pure pursuit/PID/stanley控制实现
自动驾驶路径规划与控制-ROS仿真实现
02_launch文件解读
采用c++制作漂亮的桌面应用程序
[保姆级教程] 自动驾驶路径规划与控制-数据发布(下)[带你手写一个c++文件实现控制命令的发布]
[保姆级教程](重置版)自动驾驶路径规划与控制-数据发布(上)
【C++面试100问】第九十九问:char*和char[]的区别是什么
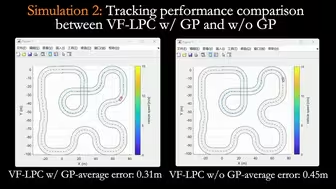
向量场引导的无人车学习预测运动规划算法
开环端到端demo展示
端到端自动驾驶demo
[自动驾驶保姆级教程之c++基础扫盲]手把手带你写C++程序--结构体&结构体指针
自动驾驶路径规划与控制-pure pursuit控制实现
05验证脚本解读-1
卧槽!这么好的【无人驾驶技术】全套教程不能只让我一个人学习,感知实战、视觉定位、路径规划、预测系统,翻遍全网找不到比这更详细的了!!!(自动驾驶/人工智能AI)
Carla和yolo的联合
端到端自动驾驶demo展示
Matlab玩家狂喜!!!纵享丝滑~
年薪百万的人,都在过什么样的生活?访谈100位年入百万的朋友,第九期!
04model解读
[保姆级教程]自动驾驶路径规划与控制-数据发布(上)(ROS命令与数据结构基础知识)
[自动驾驶保姆级教程之c++基础扫盲]手把手带你写C++程序
Carla和Sumo联合仿真
YOLOv8+PSMNet+Deepsort,实现目标检测、追踪和测距!
rda-ros开源:RDA planner 的ROS接口及在自动驾驶和动态避障方面的应用展示
03train脚本解读
武汉大学计算机硕士,工作2年的薪资情况。
Autoware.universe和awsim联合仿真
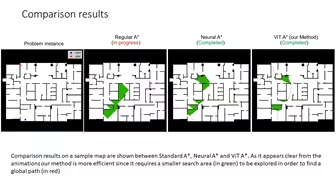
[Humanoid 2023] ViT A*: Legged Robot Path Planning using Vision Transformer A*
【PX4+RACER】多机自主探索测试
第5节_后轮反馈控制算法
端到端数据采集
EM Planner is all u need?