V
主页
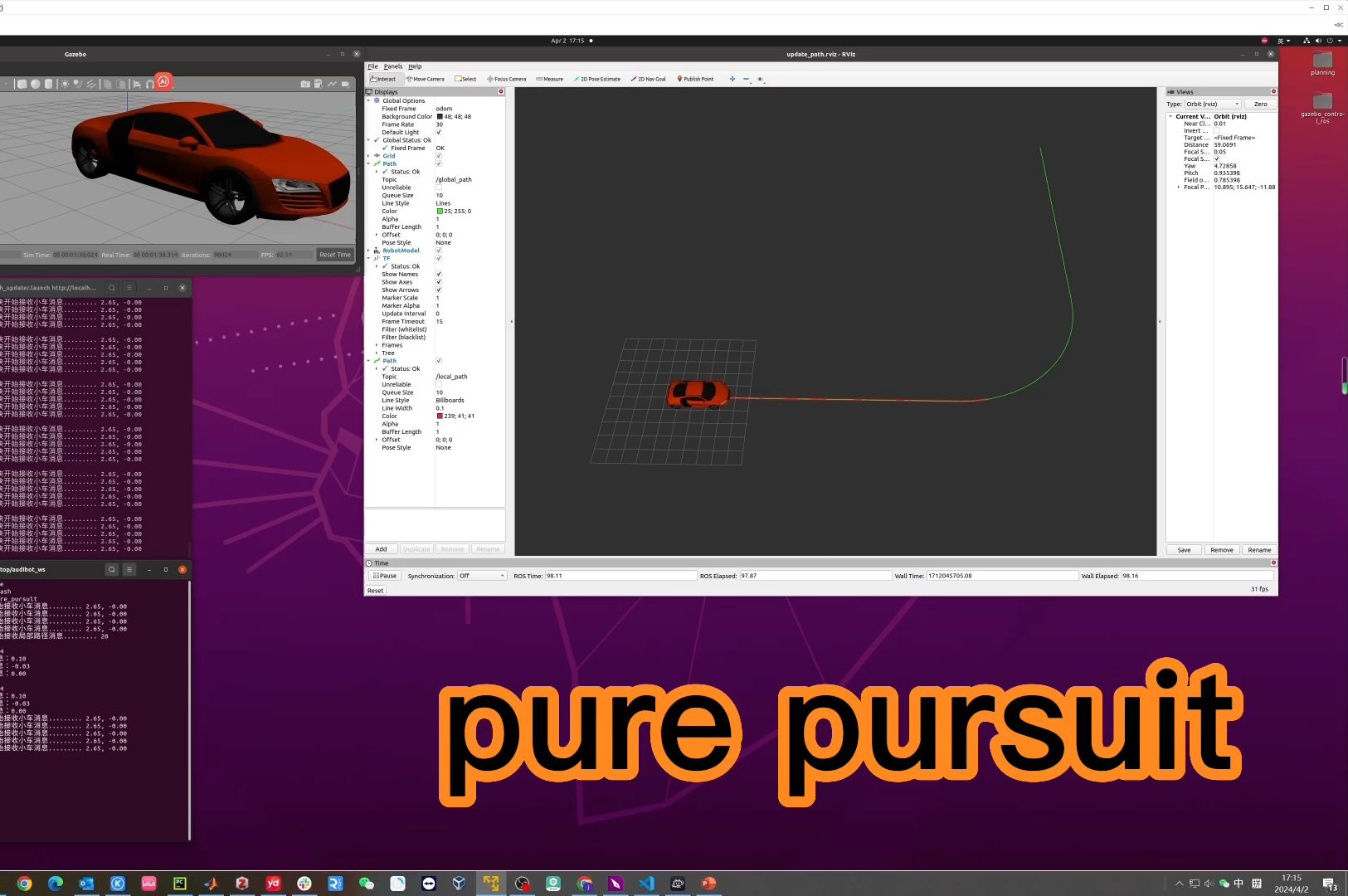
自动驾驶路径规划与控制-pure pursuit/PID/stanley控制实现
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
端到端自动驾驶demo
轨迹优化|矩形增量膨胀安全走廊构建算法(附ROS C++/Python实现)
开源!基于RRT*的路径规划算法(ROS C++/Python/Matlab实现)
Carla和Sumo联合仿真
开环端到端demo展示
第三组 路径规划算法(2024年)
[强化学习]自动驾驶路径规划与控制-DQN/DDPG+pure pursuit路径跟踪实现
[预告] 利用carla-ros-bridge实现自动驾驶路径规划与控制
[ROS简介]一句话说清楚什么是ROS!
[保姆级教程]自动驾驶路径规划与控制-数据发布(中)[vscode环境设置,创建功能包,cmake文件设置]
Carla和yolo的联合
100行C++实现旋转正方体,但是控制台
VR+CARLA
局部同伦运动路径规划
使用 Isaac Sim 和 Isaac ROS 实现 AMR 视觉导航
自动驾驶路径规划与控制-pure pursuit控制实现
自动驾驶入门技术全栈实战解析-1-感知篇
[保姆级教程](重置版)自动驾驶路径规划与控制-数据发布(上)
[保姆级教程] 自动驾驶路径规划与控制-数据发布(下)[带你手写一个c++文件实现控制命令的发布]
端到端自动驾驶demo展示
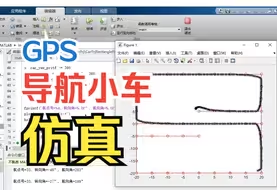
自动驾驶路径规划与控制-ROS仿真实现
STM32 自主导航小车 S弯 航线跟踪 路径规划 MATLAB仿真
C++能有多难?
自动驾驶时代即将来临⚡️
闲置一年的自制ros小车,终于第一次成功利用开源gmapping建图
01_案例展示
自动驾驶入门技术全栈实战解析-2-定位篇
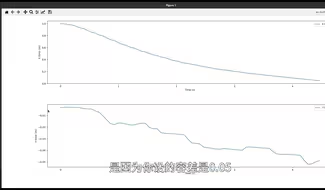
04_PID改进讲解-1
[自动驾驶保姆级教程之c++基础扫盲]手把手带你写C++程序
[全网首发 | 保姆级教程] 手把手教会你在anaconda环境中编译和安装carla-ros-bridge
罗技G923联合carla仿真
有个说法:“「递归」是检验编程天赋的试金石”;而本视频打破天赋壁垒,助你快速掌握递归。
02_launch文件解读
使用Qt,C++,python,Opencv联合编程写的基于声音识别的人员状态检测软件
ROS控制 | 小车底盘控制讲解
03_路径发布节点解读-1
C与C++的区别究竟是什么?
Isaac Sim和ROS2自主移动机器人(bcr_bot)
C++ 必知必会(终)文档发布
自驾车ROS实践 - Self Driving and ROS – Learn by Doing! Odometry & Control