V
主页
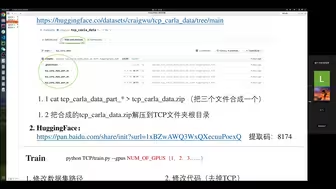
端到端数据采集
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
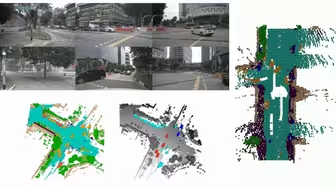
ROS2自动驾驶|边做边学(二)地图与定位
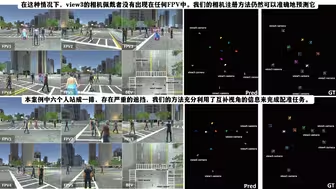
开环端到端demo展示
端到端自动驾驶demo展示
如何将传感器采集数据转换为工程量的值?
Carla和yolo的联合
【自动驾驶技术】花18000大价钱买的无人驾驶课程,从入门到提升的自动驾驶算法——感知实战、视觉定位、预测系统、路径规划、控制理论、强化学习
01模型讲解-1
Carla和Sumo联合仿真
罗技G923联合carla仿真
端到端自动驾驶demo
02项目运行配置-1
CVPR'24 | BEVSee: 无需相机校准的联合相机 和拍摄对象配准
Momenta24中秋礼盒!全网首开箱!
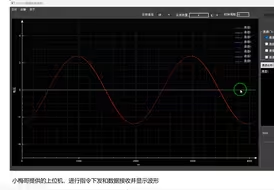
车灯亮度是怎么得到的,带你看数据采集现场
05验证脚本解读-1
马斯克炫耀新机房,特斯拉超级计算集群内部曝光
这才是科研人该学的!一口气学完自动驾驶八大算法-环境感知、目标检测、语义分割、强化学习、决策与控制算法!原理到实战,太通俗易懂了!机器学习|深度学习|计算机视觉
Python爬虫|京东h5st算法构成分析,批量采集商品商家数据
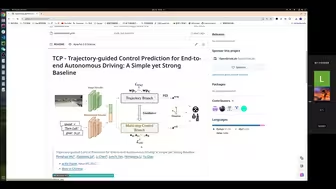
端到端基础!从原始传感器数据到控制策略
来自民间的30项关于特斯拉FSD v12版本 以上的实测,带你深度感受端到端 自动驾驶技术线路的优缺点
[自动驾驶保姆级教程之c++基础扫盲]手把手带你写C++程序
[强化学习]自动驾驶路径规划与控制-DQN/DDPG+pure pursuit路径跟踪实现
凯迪拉克为什么没人喷?
采集PLC数据并通过加密的方式上传到用户自己的平台
特斯拉引爆在端到端技术大解密,分层解耦的端到端自动驾驶系统
VR+CARLA
04model解读
Autoware.universe(ros2 humble)和Carla 0.9.15联合仿真
汽车架构未来趋势,会是autoSAR 与AI结合吗?
大疆智驾,把端到端拉下神坛
广汽丰田首款端到端高阶智驾车型铂智3X,让20万内高阶智驾不再唯一,将高阶智驾带入1时代!
基于STM32的数据采集+心率检测仪(源码+原理图PCB+论文)
A_16位8通道同步采样模数数据采集模块-AD7606模块介绍
自动驾驶路径规划与控制-pure pursuit/PID/stanley控制实现
C_基于AD7606模块的以太网数据采集系统详解
理想汽车广东省端到端+VLM内测视频合集来啦!!和小粤一起看看吧
ECCV'24 | 从BEV到OSP:自动驾驶场景建模新趋势,提供更灵活精确的空间预测
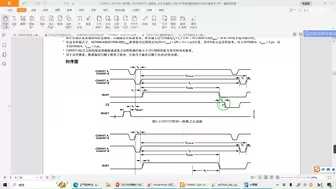
B_逐行详解基于Verilog的AD7606驱动代码
拿放大镜看!地平线高阶城区方案来了!
端到端人工智能量化选股策略【量化实验室】