V
主页
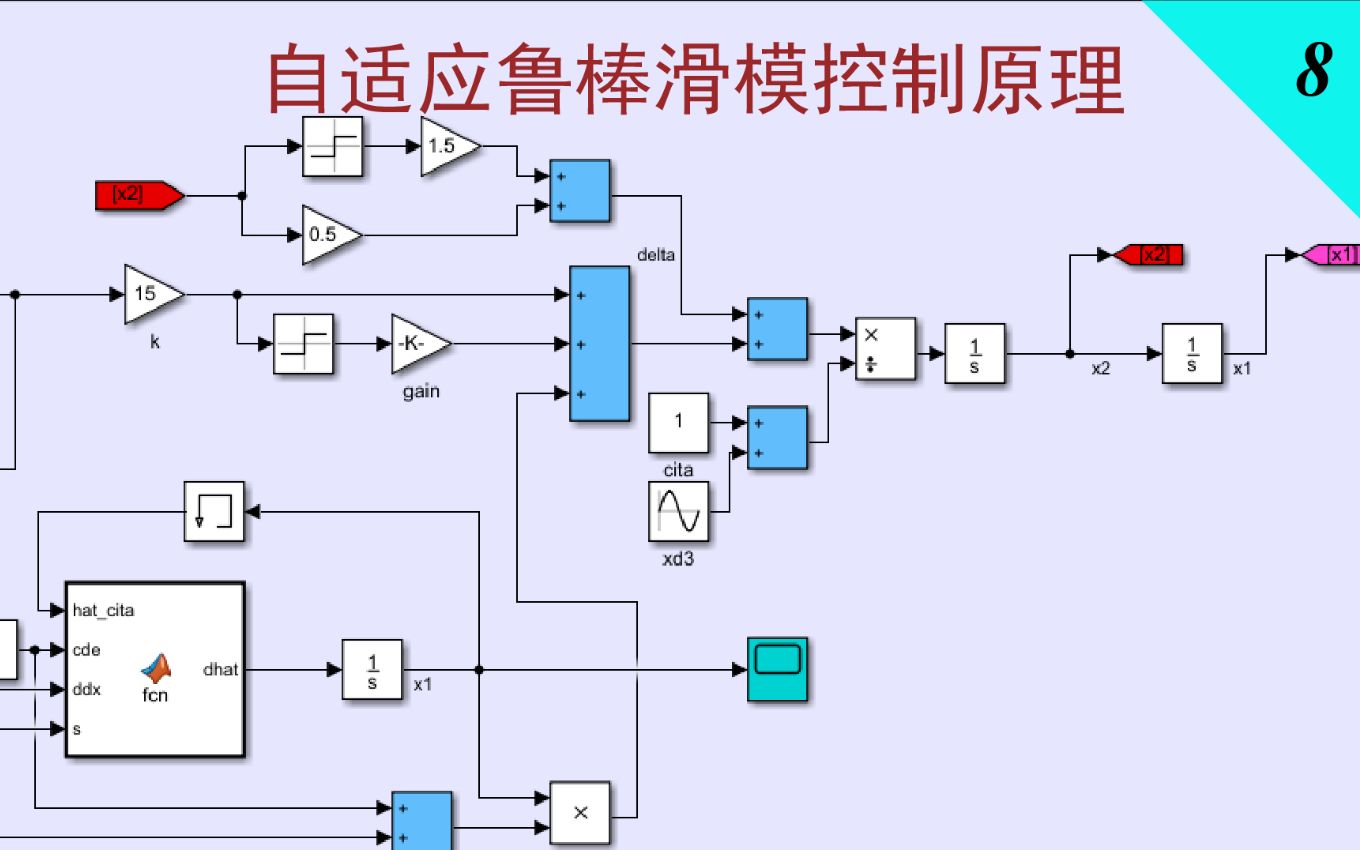
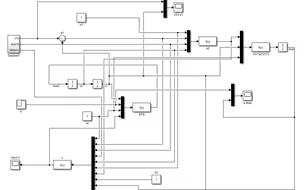
8、自适应鲁棒滑模控制原理
发布人
自适应鲁棒滑模控制原理及其仿真实现,喜欢的请一键三连,有条件的小伙伴可以充电。
打开封面
下载高清视频
观看高清视频
视频下载器
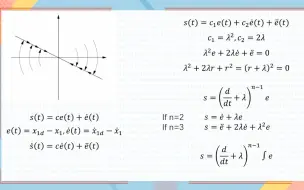
滑模控制原理的简单介绍
滑模控制基本概念,非线性系统控制器设计以及simulink仿真初步
滑模控制简单思想和推导一
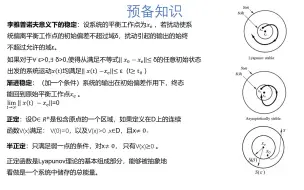
非线性自适应控制预备知识(Lyapunov稳定性)
鲁棒优化-基础知识介绍
基于MATLAB机械臂自适应模糊滑模控制仿真多种控制比较
【Advanced控制理论】17_Robust Controller_非线性鲁棒控制器_Sliding Mode_滑模控制
什么是鲁棒控制?(中英双语字幕)
【Brian Douglas】自适应控制基础:什么是模型参考自适应控制?
1、滑模控制的基本原理
(自适应)滑模控制-从入门到制导实战
【Matlab】控制算法——自适应控制
非线性反步法、自适应控制器以及simulink仿真(讲解细致,超容易理解,小刻都听得懂doge)
基于RBF神经网络的欠驱动船舶轨迹跟踪自适应滑模控制
滑模控制的二阶模型实例(使用Simulink/Level-2 S-Function实现)
0基础直接带你上手matlab simulink仿真(不是标题党,讲解超级细致用心)(非线性系统自适应控制器的搭建)
S-Function/S函数补充,滑模控制器完整搭建
滑模面选择及浅讲多变量控制
滑模鲁棒控制以及simulink仿真
【自适应控制】极点配置自校正PID控制算法理论及其Matlab实现
【自适应控制】Lyapunov-MRAC算法理论及其Matlab实现
【Advanced控制理论】19_三种鲁棒控制器的比较+如何分析控制器_Matlab Simulink
4、简单的鲁棒滑模控制设计
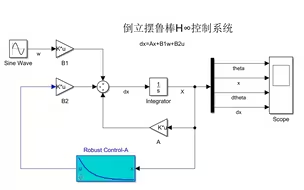
Matlab和控制理论(九)鲁棒H∞控制和仿真模型搭建
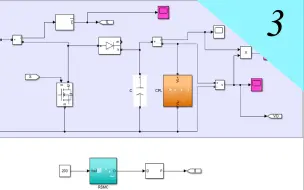
2、buck变换器的滑模控制设计
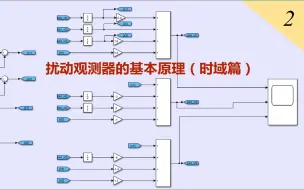
2、扰动观测器的基本原理(时域篇)
5、滑模观测器的基本原理(从龙伯格到滑模)
考虑扰动的欠驱动船舶轨迹跟踪自适应滑模控制Matalb仿真
【MATLAB官方教程】鲁棒控制Robust Control(更新中(中英字幕)
鲁棒控制理论(浙江大学 苏宏业)
Matlab和控制理论(十)滑模控制器原理和柔性体控制
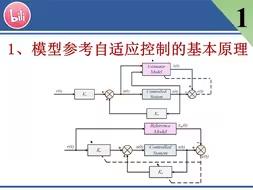
1、模型参考自适应控制的基本原理(直接模型参考自适应控制与间接模型参考自适应控制的比较)
【Advanced控制理论】16_Nonlinear Adaptive Controller_非线性自适应控制器
4、非线性扰动观测器的基本原理
手把手教你在Simulink中实现滑模控制系统搭建——从物理模型到滑模控制器到Simulink实现(简单案例,详细操作)
机器人机械手鲁棒固定时间跟踪滑模控制的MATLAB仿真
无人车轨迹跟踪控制 | H无穷鲁棒控制 | Matlab/simulink仿真
基于参数估计误差的自适应控制:理论及应用
6、基于滑模观测器的滑模控制算法在buck变换器中的电流跟踪控制应用
3、boost变换器在恒功率负载情况下的鲁棒滑模控制(详解篇)