V
主页
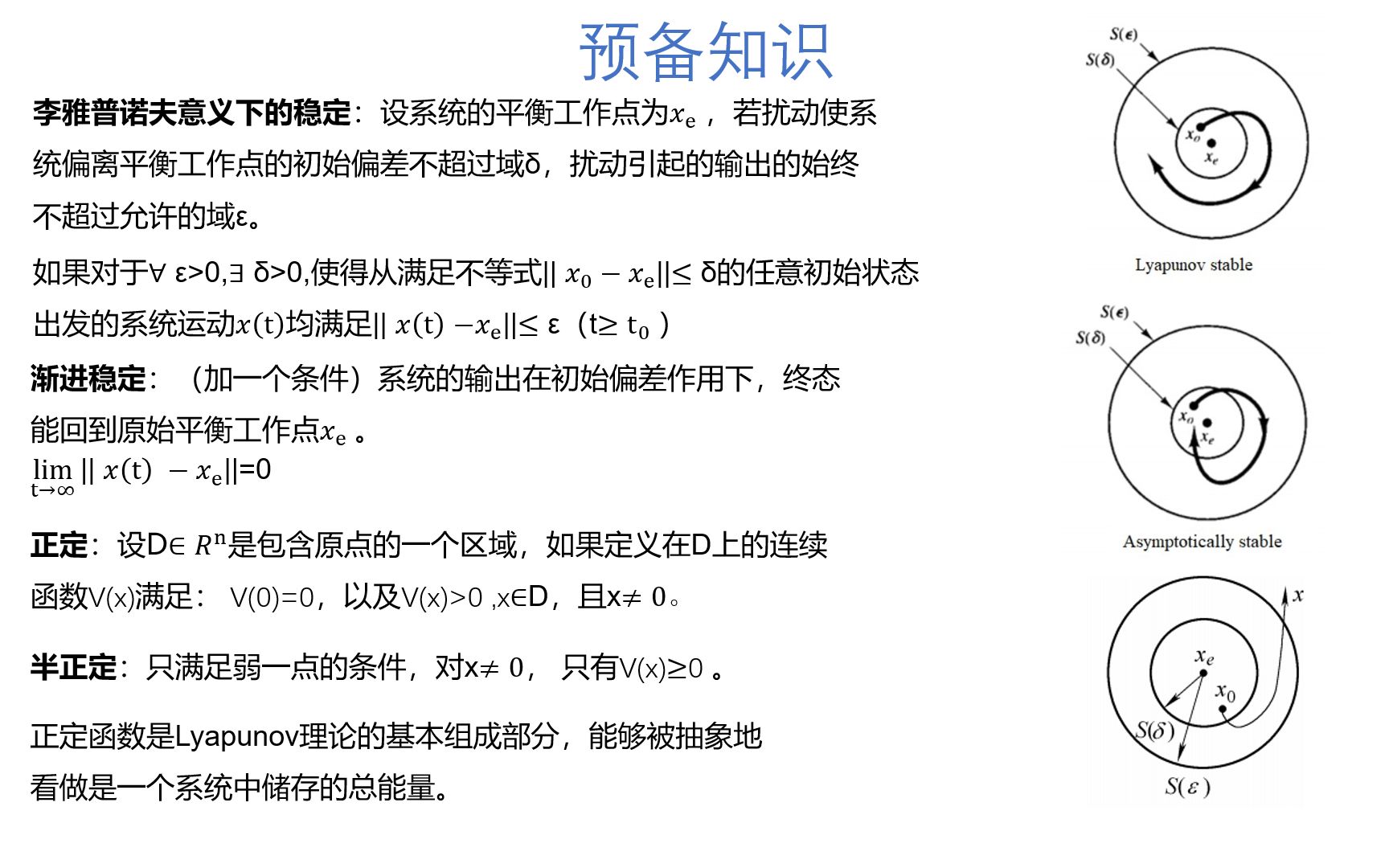
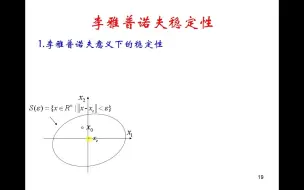
非线性自适应控制预备知识(Lyapunov稳定性)
发布人
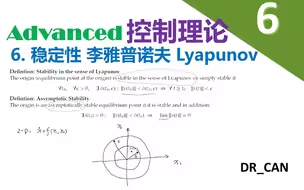
本视频介绍了李雅普诺夫(Lyapunov)稳定性的定义,以及判断稳定性的条件,主要是另一个视频非线性自适应控制器的配套视频。第一次发视频,讲的有点紧张,希望大家理解一下。
打开封面
下载高清视频
观看高清视频
视频下载器
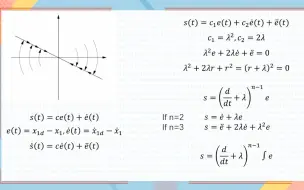
0基础直接带你上手matlab simulink仿真(不是标题党,讲解超级细致用心)(非线性系统自适应控制器的搭建)
(自适应)滑模控制-从入门到制导实战
【Advanced控制理论】16_Nonlinear Adaptive Controller_非线性自适应控制器
定义篇—Lyapunov稳定性—稳定,渐近稳定
滑模控制【讲清原理】-1
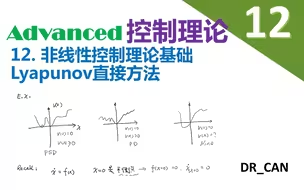
【Advanced控制理论】12_非线性理论基础_Lyapunov直接方法
滑模控制基本概念,非线性系统控制器设计以及simulink仿真初步
1、滑模控制的基本原理
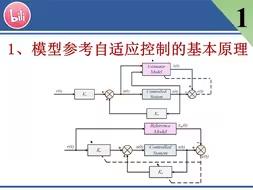
1、模型参考自适应控制的基本原理(直接模型参考自适应控制与间接模型参考自适应控制的比较)
【Advanced控制理论】1_介绍
【自适应控制】Lyapunov-MRAC算法理论及其Matlab实现
【Advanced控制理论】17_Robust Controller_非线性鲁棒控制器_Sliding Mode_滑模控制
【Matlab】控制算法——自适应控制
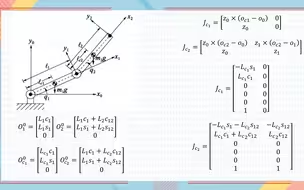
机器人DH法、运动学、雅克比(Jacobian)矩阵
这道题怎么构造Lyapunov函数?【常微分方程一道习题的讲解】
8、自适应鲁棒滑模控制原理
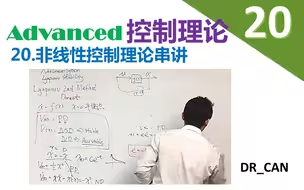
【Advanced控制理论】20_非线性控制理论串讲+闲话
【Advanced控制理论】6_稳定性_李雅普诺夫_Lyapunov
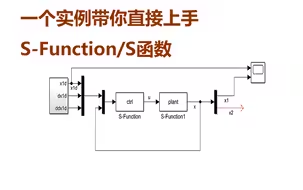
S-Function/S函数,一个实例带你直接上手(非线性反步法搭建)
【官方自制】 Simulink 基础入门系列(全7P)
非线性控制理论(浙大)
非线性控制理论(2022春) 1-1 Introduction
【系统辨识与自适应控制】模型参考自适应控制(MIT-MRAC)理论及其MATLAB实现
Matlab和控制理论(一)基本用法和模块介绍
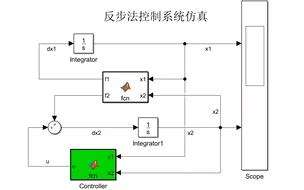
非线性反步法、自适应控制器以及simulink仿真(讲解细致,超容易理解,小刻都听得懂doge)
非线性系统的各种稳定性含义深入讲解,一次讲透,全网唯一
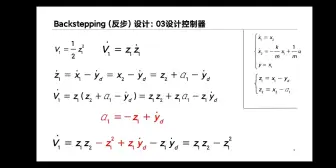
【非线性控制理论】反步设计法(个人最详细的讲解)
李雅普诺夫稳定性
Lec10-1: 非线性系统Lyapunov稳定性概念/原理/证明/例子
二连杆机械臂动力学(使用雅克比Jacobian矩阵)
00现代控制理论15(补Lyapunov稳定性)
非线性控制系统的三种稳定性及Lyapunov稳定性定理
Matlab和控制理论(四)控制系统Simulink建模的4种方法
【手把手建模】一起做一个基于MATLAB/Simulink的非线性自适应控制器吧!
PID原理讲解与Matlab/Simulink仿真,初中生就能看的懂
常微分方程李雅普诺夫稳定性的概念
滑模面选择及浅讲多变量控制
Matlab simulink建模与仿真视频教程
24课时 李雅普诺夫稳定性的定义和内涵
Matlab和控制理论(十二)反步法设计步骤和仿真过程