V
主页
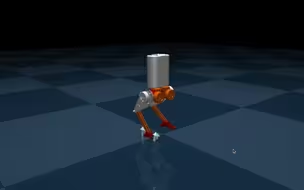
NMPC+WBC+mujoco仿真 12自由度双足人形机器人行走控制
发布人
架构为OCS2的NMPC,qpOASES的WBC,仿真环境为mujoco。 参考了OCS2足式机器人官方例程,廖洽源大佬的legged_control,长空御风和bridgeDP的hunter,高擎的pai仿真,用了自己和另一位同学一起设计的机器人模型。 项目还有一些问题,不少坑没填完,填完了会整理整理然后开源。现在想看代码的可以私聊我。 本人刚上研究生,还处于学习阶段,水平有限,各位大佬勿喷(加防御)
打开封面
下载高清视频
观看高清视频
视频下载器
loco-mujoco:MuJoCo模仿学习复杂运动任务|2023【德国达姆城工业大学】
开源:使用mujoco进行pai双足机器人仿真
【开源】基于MPC控制的双腿机器人开源仿真hector,有gazebo,有Matlab版本
[开源软件]最近测试了一下mujoco,玩了一下cassie的仿真,安装很简单,大家可以玩一下
使用Isaac-sim训练双足机器人行走
抄国外开源代码用国外仿真器Isaac Gym训练机器人
MIT Humanoid - Convex MPC 双足机器人步态测试
Mujoco和ROS联合仿真
你的下一个机器人仿真环境,何必是isaac sim
开源:使用mujoco进行hector双足机器人仿真
宇树科技B1mujoco仿真
双足机器人终于能动了
Mujoco仿真的强化学习小记
【Python】控制算法——计算力矩控制
ACADO生成NMPC代码,贼拉快!
MuJoCo机器人强化学习仿真入门|从零开始的MuJoCo世界生活之强化学习篇【课程试看】
MIT双足机器人使用强化学习学习走路的模拟--有urdf stl文件以及mujoco用的xml文件
HECTOR V2 小型人形机器人 - 解锁人形更高动态极限!
基于点式双足机器人的强化学习测试
【新进展】双足机器人凸模型预测控制(convexMPC)+全身控制(WBC)双足站立 MATLAB Spatial V2 仿真
【更新完毕】MuJoCo 200版本系列教程 (2022)by Pranav A. Bhounsule
人形机器人控制仿真
2022年5月Win10系统安装开源mujoco教程,奶奶都会的那种
开源人形双足机器人
Hector人形机器人开源仿真ROS+Gazebo/MPC运动控制
实时最优控制讲座 —— OCS2 教程
ubuntu中mujoco安装教学
MuJoCo 仿真 案例欣赏
ANYmal-C四足机器人运动控制和四种关节结构变形的mujoco仿真
nmpc求解器-代码讲解
连续高动态双足跳跃 - Continuous Dynamic Bipedal Jumping via Adaptive-model Optimization
宇树B1mujoco仿真爬楼梯斜坡以及轮足改造
开源双足人形机器人运动控制代码启动演示
[搬] 通过 3D SLIP+足部动力学实现高度机动的人形跑步
【RoboMaster】运动学解算而已,也没啥含金量
开源代码已添加 Mujoco 仿真器支持,该视频为启动演示
isaacgym-一周实现从四足到两足的奔跑
ROS1 VS ROS2 视频流传输对比 带宽 延迟 帧率
稚晖君的机器人又融资了,最新估值70亿
手搓人形机器人进度1/3