V
主页
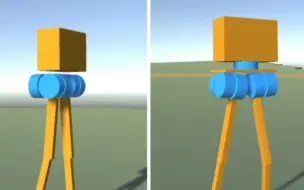
开源:使用mujoco进行pai双足机器人仿真
发布人
Github链接:https://github.com/humarobot/Hector_Simulation/tree/pai_control 相比于原Hector的控制器,用了pinocchio做运动学计算,卡尔曼滤波做状态估计,基本上可以往实物移植了。不过还留了一些小bug。 知乎:飞鸟出林
打开封面
下载高清视频
观看高清视频
视频下载器
NMPC+WBC+mujoco仿真 12自由度双足人形机器人行走控制
开源:使用mujoco进行hector双足机器人仿真
Mujoco仿真的强化学习小记
MIT Humanoid - Convex MPC 双足机器人步态测试
双足机器人简单跳跃仿真
宇树科技B1mujoco仿真
Hector人形机器人开源仿真ROS+Gazebo/MPC运动控制
MuJoCo机器人强化学习仿真入门|从零开始的MuJoCo世界生活之强化学习篇【课程试看】
开源人形双足机器人
ansys workbench双足机器人,瞬态结构和Solidworks联合仿真,原地踏步+前进步态
双足机器人Cassie开源代码仿真运行、MATLAB2017b安装与破解
开源双足人形机器人运动控制代码启动演示
双足机器人终于能动了
[开源软件]最近测试了一下mujoco,玩了一下cassie的仿真,安装很简单,大家可以玩一下
loco-mujoco:MuJoCo模仿学习复杂运动任务|2023【德国达姆城工业大学】
【Isaac Gym】四足&双足-强化学习训练效果
阶段性成果: 六自由度点接触式双足机器人以0.5m/s速度前进。
Hector人形机器人运动控制开源仿真Simulink Simscape & MPC - 1. 简单上手介绍
PID、LQR、MPC实时控制倒立摆仿真对比
【开源】基于MPC控制的双腿机器人开源仿真hector,有gazebo,有Matlab版本
[搬] 利用实时非线性 MPC 的双足运动Seamless反应策略
[搬] 通过 3D SLIP+足部动力学实现高度机动的人形跑步
山东大学机器人中心电动腿足组 | 双足机器人-BRAVER
MIT双足机器人使用强化学习学习走路的模拟--有urdf stl文件以及mujoco用的xml文件
TinyMPC model-predictive-control-on-resource-constrained-microcontrollers
【强化学习】yaw关节对双足机器人转向的影响
[开源] 点接触式双足机器人动态行走测试
你的下一个机器人仿真环境,何必是isaac sim
使用Isaac-sim训练双足机器人行走
双足机器人第一次行走
小试一下双足机器人仿真
开源代码已添加 Mujoco 仿真器支持,该视频为启动演示
mujoco强化学习--MIT双足机器人
steamdeck 运行Hector双足机器人仿真
HECTOR双足机器人简易onboard无线控制测试
日本小型双足机器人
MuJoCo 仿真 案例欣赏
开源双足机器人Bolt的3D原地踏步测试视频
我们做了一款双足机器人
【更新完毕】MuJoCo 200版本系列教程 (2022)by Pranav A. Bhounsule