V
主页
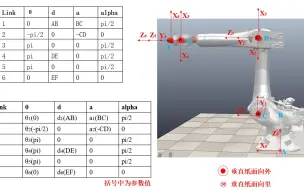
第12课.底层-运动学正逆解代码讲解
发布人
ROS理论与基础
打开封面
下载高清视频
观看高清视频
视频下载器
3-12运动学逆解示例:PUMA560
第09课.底层-电机PWM控制代码讲解
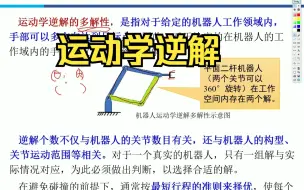
3-11运动学逆解
5. 机械臂运动学逆解
第11课.底层-电机PID控制算法代码讲解
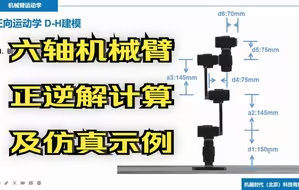
全程干货【六轴机械臂正逆解计算及仿真示例】
六自由度机械臂正逆解分析及写汉字仿真(一)
PID,速度环,位置环,速度位置串级PID
【机器人理论最好中文入门课程 没有之一】 机械臂 系统 结构 旋转矩阵 变换矩阵 DH模型 运动学正逆解 轨迹规划 动力学 控制 遥控操作 教程
【Matlab机器人工具箱】- 运动学①---建立机器人模型--1、Link类 2、SerialLink类
四自由度机械臂逆解抓取(含代码)
机器人运动学-逆运动学
第10课.底层-ROS层通信框架代码讲解
matlab 机器人 运动学 正逆运动学 轨迹规划 出图
第08课.底层-编码器计算速度代码讲解
PLC程序避开一个扫描周期的办法,不用定时器#plc #信捷plc
第04课.Rviz工具学习使用
第24课.机器人巡线代码讲解
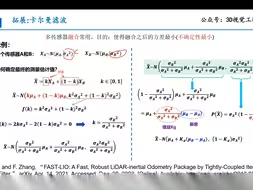
卡尔曼滤波到底是要干啥?把握住这个核心思想就能完全理解!
6自由度并联机构运动学正解算法详细讲解-matlab代码分享
串联和并联机器人运动学与动力学分析
第13课.ROS层PID可视化参数调节
第2讲:ROS基础
第6节 基于图优化的激光SLAM方法(Grid-based) (1)cartographer代码讲解
B站强推!2024最新版【机器人操作系统ROS】教程,200集付费课程(附数据集)(含实战项目、BI可视化报表、AI人工智能,数据挖掘,面试内推)
第25课.雷达跟随代码讲解
机械臂运动学求解
第9讲:ROS2.0
第30课.机器人自主探索建图
六自由度工业机器人DH建模与逆运动学仿真
6自由度并联机构 Adams/Simulink 联合仿真教程
第16课.机器人gmapping建图
3-22六自由度机器人Matlab机器人工具箱运动学逆解robot.ikine及其他
六自由度机械臂讲解(含DH模型与正逆运动学讲解)
第1讲:认识ROS
3、4自由度机械臂正逆解推导与代码实现 【课程试看】
第27课.RGBD-Slam融合原理讲解
六自由度机械臂正运动学和逆运动学理论分析及程序
第28课.RGBD-Slam建图导航
第19课.cartographer建图课程