V
主页
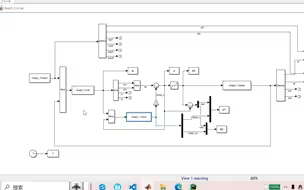
【机器人控制】机器人机械臂任务空间自适应神经网络控制
发布人
机器人控制 | RBF network | C reference: [1] 刘金琨,机器人控制系统的设计与Matlab仿真,北京:清华大学出版社 [2] https://github.com/weichaoliu7/adaptive-NN-control-manipulator-in-task-space [3] Shuzhi S G, Hang C C, Woon L C. Adaptive neural network control of robot manipulators in task space[J]. IEEE transactions on industrial electronics, 1997, 44(6): 746-752.
打开封面
下载高清视频
观看高清视频
视频下载器
【机器人控制】基于模型不确定补偿的 RBF 网络单机械臂自适应控制
【简易机械臂教程】定点坐标控制-逆运动学解、上位机、电路设计、编程实现、下位机、系统思维、资料开源……(完结)
【机器人控制】基于模型整体逼近的机械臂 RBF 网络自适应控制
【机器人控制】机械臂独立PD控制
柴天佑《自适应控制》课程
基于RBF径向基神经网络自适应调节PID 控制器参数
MATLAB机器人工具箱10.4 机械臂仿真教学(未完结)
MATLAB 非严格反馈非线性自适应神经控制的仿真
8、自适应鲁棒滑模控制原理
这可能是b站最全的【MATLAB神经网络和优化算法】教程!68讲全!大佬带你入门!简单易懂,手把手带你走进AI人工智能世界!
机器人学:建模、控制与视觉——华中科技大学
【机器人控制】模糊模型参考自适应控制
基于RBF神经网络的自适应控制器simulink建模与仿真
【机器人理论最好中文入门课程 没有之一】 机械臂 系统 结构 旋转矩阵 变换矩阵 DH模型 运动学正逆解 轨迹规划 动力学 控制 遥控操作 教程
机械臂研究入门必看流程!URDF导入|仿真平台|运动规划|运动学
【系统辨识与自适应控制】模型参考自适应控制(MIT-MRAC)理论及其MATLAB实现
【机器人控制】机械臂鲁棒自适应 PD 控制
【机器人控制】参数扰动和外部扰动下机器人系统非线性H_infty控制
基于MATLAB机械臂自适应模糊滑模控制仿真多种控制比较
适用所有机械臂!轨迹跟踪仿真!matlab算法!手把手教程|源码公开
【多目标优化】多目标灰狼优化(MOGWO)算法
【自适应控制】Lyapunov-MRAC算法理论及其Matlab实现
智能控制(26讲)-中南大学-蔡自兴
神经网络无人机自适应控制
【一区论文复现】自适应强化学习机械臂控制
【机器人控制】基于死区补偿的RBF网络机械臂自适应鲁棒控制
【多目标优化】基于分解的多目标进化算法(MOEA/D)
基于RBF神经网络的欠驱动船舶轨迹跟踪自适应滑模控制
【史上最强机械臂教程】机械臂运动学、轨迹规划和动力学控制仿真
论文分享 - 让我吃惊的神经网络控制器应用
基于反向步法的RBF神经网络MATLAB仿真
【系统辨识与自适应控制】批量最小二乘法(LS)理论及其MATLAB实现
【机器人控制】基于模型不确定补偿的 RBF 网络双机械臂自适应控制
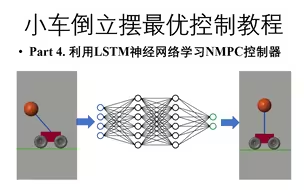
小车倒立摆最优控制教程 - Part4 利用LSTM神经网络学习NMPC控制器实现实时控制
MATLAB机械臂轨迹规划(任务空间+关节空间)
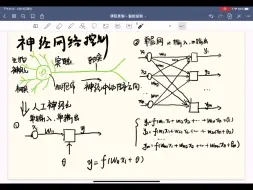
智能控制-神经网络概述
非线性自适应控制器的建模以及MATLAB/Simulink仿真
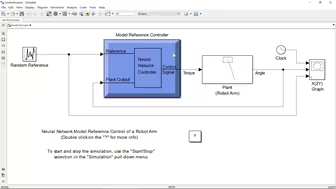
Simulink-神经网络控制系统-模块演示
第三届群内外骨骼研讨会(3)RBF神经网络自适应控制上肢外骨骼
【模糊控制】两轮倒立摆小车的间接自适应模糊控制