V
主页
【系统辨识与自适应控制】批量最小二乘法(LS)理论及其MATLAB实现
发布人
系统辨识与自适应控制 | 批量最小二乘法 | LS | MATLAB 萌新up主,有什么问题可以多多交流,互相学习 Reference: [1]《系统辨识与自适应控制》杨承志 孙棣华 张长胜编著 [2]https://pan.baidu.com/s/1KFcQirObZ6ln1RmCHdoNKg 提取码:676e
打开封面
下载高清视频
观看高清视频
视频下载器
【系统辨识与自适应控制】模型参考自适应控制(MIT-MRAC)理论及其MATLAB实现
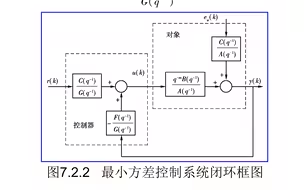
【自适应控制】最小方差控制(MVC)算法的 Matlab 实现
【自适应控制】广义最小方差控制(GMVC)算法理论及其Matlab实现
【自适应控制】最小方差控制(MVC)算法公式推导
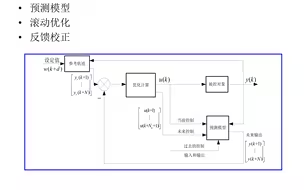
【模型预测控制】广义预测控制(GPC)算法及其MATLAB实现
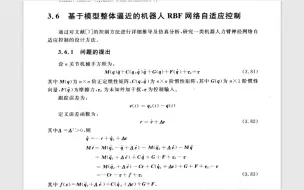
【机器人控制】基于模型整体逼近的机械臂 RBF 网络自适应控制
【自适应控制】Lyapunov-MRAC算法理论及其Matlab实现
【7月】不时用俄语小声说真心话的邻桌艾莉同学 01【独家正版】
【模糊控制】两轮倒立摆小车的间接自适应模糊控制
【7月】百变的七仓同学 01【独家正版】
【机器人控制】模糊模型参考自适应控制
【机器人控制】基于模型不确定补偿的 RBF 网络单机械臂自适应控制
【机器人控制】基于模型不确定补偿的 RBF 网络双机械臂自适应控制
【全局优化】自适应粒子群算法(APSO)
【机器人控制】机器人机械臂任务空间自适应神经网络控制
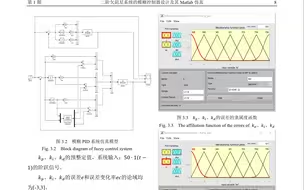
【模糊控制】模糊PID控制及其MATLAB仿真_苏明
【机器人控制】机械臂鲁棒自适应 PD 控制
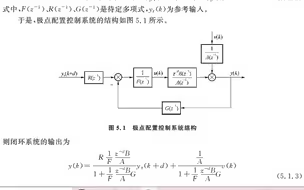
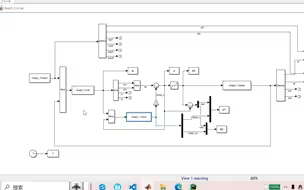
【自适应控制】极点配置自校正PID控制算法理论及其Matlab实现
【自适应控制】极点配置控制(PPC)理论及其Matlab实现
【全局优化】基于成功历史的自适应差分进化算法(SHADE)
【机器人控制】基于死区补偿的RBF网络机械臂自适应鲁棒控制
【机器人控制】机械臂独立PD控制
【模糊控制】基于模糊逻辑的智能交通信号灯控制
【机器人控制】参数扰动和外部扰动下机器人系统非线性H_infty控制
【机器人控制】基于模型分块逼近的机械臂 RBF 网络自适应控制
【全局优化】灰狼优化算法
【自适应控制】小型无人驾驶飞行器自动驾驶仪的参数自校正
【进化算法】协方差矩阵自适应进化策略综述
Matlab | 控制系统工具箱 | sysic 函数详解
【实验实录】求解带时间窗车辆路径问题(VRPTW)的多蚁群系统
歌声表达心声
没有人告诉你的,大佬们精力充沛的底层原因。
【优化算法】基于参考点的非支配排序遗传算法NSGA-III的Python实现
【最优控制】四旋翼无人器的扩展卡尔曼滤波器和LQR控制器设计
【多目标优化】基于参考点的非支配性排序遗传算法(NSGA-III)C++实现
【优化算法】粒子群优化算法及其C语言实现
【进化算法】非支配性排序遗传算法II(NSGA-II)原理及其Python实现
【多目标优化】约束多目标进化优化中约束处理技术的比较研究
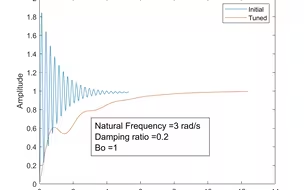
【智能控制】欠阻尼二阶系统的模糊控制器设计及其Matlab仿真
【全局优化】综合学习粒子群算法(CLPSO)