V
主页
[NeRF进展,实时流建模] 斯坦福大学提出NeRFBridge,将机器人操作系统ROS与nerfstudio桥接,实时在线流式训练NeRF模型
发布人
NerfBridge: Bringing Real-time, Online Neural Radiance Field Training to Robotics Javier Yu, Jun En Low, Keiko Nagami, Mac Schwager arXiv: https://arxiv.org/abs/2305.09761 代码:https://github.com/javieryu/nerf_bridge Neural radiance fields (NeRFs) are a class of implicit scene representations that model 3D environments from color images. NeRFs are expressive, and can model the complex and multi-scale geometry of real world environments, which potentially makes them a powerful tool for robotics applications. Modern NeRF training libraries can generate a photo-realistic NeRF from a static data set in just a few seconds, but are designed for offline use and require a slow pose optimization pre-computation step. In this work we propose NerfBridge, an open-source bridge between the Robot Operating System (ROS) and the popular Nerfstudio library for real-time, online training of NeRFs from a stream of images. NerfBridge enables rapid development of research on applications of NeRFs in robotics by providing an extensible interface to the efficient training pipelines and model libraries provided by Nerfstudio. As an example use case we outline a hardware setup that can be used NerfBridge to train a NeRF from images captured by a camera mounted to a quadrotor in both indoor and outdoor environments.
打开封面
下载高清视频
观看高清视频
视频下载器
[NeRF进展,雾状鬼影消除] 伯克利提出NeRFBusters,使用3D Diffusion模型,对随意捕捉的NeRF去除雾状鬼影
[NeRF进展,风格化与重着色,NPR方向]东京大学使用一种新的Palette提取方法,使NeRF重着色可达到实时性能,实现NPR效果(EGSR 2022)
[NeRF进展,镜头硬件参数校准] 康奈尔大学、Meta提出Neural Lens Modeling,在训练模型时同步优化相机参数,解决光学镜头参数校准问题
[NeRF进展,大规模城市场景建模] CMU, Argo AI提出SUDS,构建最大的动态NeRF,可快速重建大规模城市场景,并因分支建模,支持一定后期处理能力
[NeRF进展,物体相机] MIT与莱斯大学脑洞大开:ORCa,将有光泽的物体转为神经场相机,将反光的不可见场景建模,可以看到物体看到的而不是相机看到的场景
[NeRF进展,人脸动画,褶皱渲染] 华沙工业大学、UBC、微软、Google等提出BlendFields,在少量数据下,结合图形学方法,生成细节表情动画
[NeRF进展,实时建图] 中山大学、香港科技大学提出H2Mapping,第一个基于NeRF构建在可手持设备上运行的建图方法,效果优于NICE-SLAM
[NeRF进展,多视角数据集,群友工作] 香港中文大学:MVImgNet和MVPNet,650万帧238类标记多视角数据集,近9万点云样本,桥接2D到3D视觉
[NeRF进展,交互编辑方向] Inria, 马克斯普郞克学院提出NerfShop,使用基于Cage变形的方法进行物体的交互式选择与编辑,进一步推动实用
[NeRF进展,点云重建] 捷克理工大学提出Tetra-NeRF,使用点云为输入,使用四面体和其德劳内表达进行重建,实现更好的重建性能和效果
[动态NeRF进展] 三星尖端技术研究院提出时域插值动态NeRF方法,通过在时域进行特征向量插值,构建动态场景的神经网络表达,训练速度与质量大幅度提升
[神经渲染进展,人体与物体合成] 首尔大学、Meta提出NCHO,一种将人体与物体组合,且反应物理接触关系变化的无监督学习模型,支持重新组合与动画效果
[NeRF进展,高保真3D Avatar生成]香港科技大学、微软研究院提出Rodin,自动高保真、高细节度生成3D Avatar NeRF模型,数字虚拟人再突破
[NeRF进展,文本生成3D] Google,Ben、Jonathan提出DreamBooth3D,DreamBooth+DreamFusion,文本生成3D
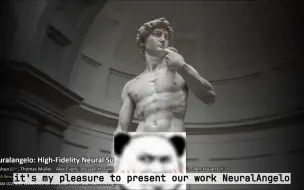
[SDF进展,哈希+SDF] nVidia, 约翰霍普金斯大学提出Neuralangelo,综合了多分辨率的hash grid和SDF,实现了更好的从RGB视频
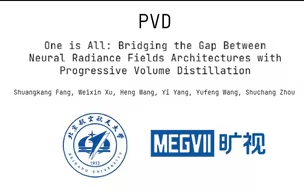
[NeRF进展,模型任意转换]北航、旷视提出PVD,可以实现任意到任意的模型转化,训练一个NeRF,可以使用框架进行处理(AAAI 2023)
[NeRF进展,Avatar实时生成] 苏黎世I联邦理工,普朗克研究所提出InstantAvatar,相比SOTA方法速度提升130倍以上,秒级别训练,实时渲染
[Diffusion+NeRF进展]慕尼黑工业大学、Meta研究院提出DiffRF (也许是首次)基于扩散模型的3D辐射场生成方法
[NeRF进展,实时渲染方向,四创始大神新作,必看!] Google Research、蒂宾根大学发布MERF,低内存实时NERF渲染,优于InstantNGP
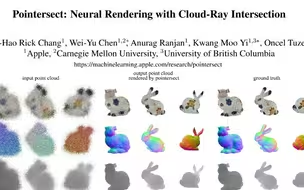
[点云+神经渲染进展] Apple, CMU, UBC提出Pointersect,给定一个点云,在不转换为其他表达的情况下,进行推理光线与表面相交性
[NeRF进展,体渲染几何优化] UCSD,Adobe, ETH,蒂宾根大学提出NeuManifold,结合体渲染与流形生成精确网格的高速渲染,与传统管线兼容
本科毕业设计——ROS小车
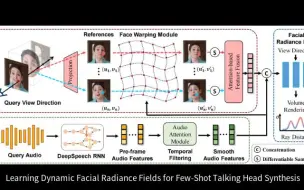
[NeRF进展,Talking Head应用] 清华大学、鉴智机器人提出DFRF,快速小样本生成高真实感、自然的讲话头,可用于数字人等(ECCV 2022)
[NeRF+Mesh进展,城市场景建模] nVidia,多伦多大学等提出FEGR,结合Mesh,将复杂几何和材质与光照效果分离,实现真实感光照效果,以及场景操控
[NeRF进展,大规模3DSRF数据集与合成模型]KAUST与慕尼黑工业大学Matthias团队提出SPARF数据集和SuRFNet,提升SRF渲染质量与性能
[NeRF进展,动态3D场景表达速度提升100倍] 密西根大学提出HexPlane,一种新的快速的3D动态场景表达方法
史蒂夫·乔布斯(Steve Jobs)2005年斯坦福大学毕业典礼演讲 | stay hungry stay foolish
[NeRF+Diffusion进展] nVidia,多伦多大学等推出NeuralField-LDM,使用神经场和生成模型解决复杂开放世界3D场景的建模和编辑能力
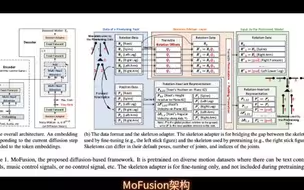
[Diffusion+Transformer,人体动画进展] 阿里达摩院刚刚提出一个统一的预训练扩散模型MoFusion,用于人体动画合成 (arXiv)
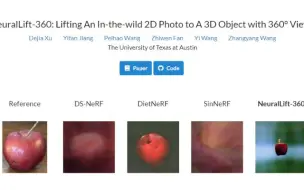
[NeRF进展,单图片成3D内容] 德克萨斯大学奥斯丁分校提出NeuralLift-360,使用单图生成3D物体
[NeRF进展,渲染质量提升] Google NeRF的几位创始人:Zip-NeRF,解决Mip-NeRF 360锯齿问题,复杂场景渲染提升,训练速度提升22倍
[NeRF+Diffusion进展,少量视触目] Nitantic推出DIffusioNeRF,使用RGBD贴片训练的DDM模型,正则化few-shot重建过程
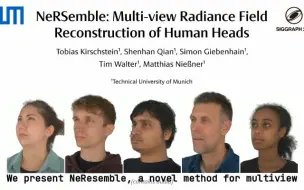
[NeRF进展,高精度人头部动作生成] TUM提出NeRSemble,组合变形场和多分辨率3Dhash编码高精度生成人头运动。同时提供多视角高精度运动数据集
01-机械臂算法和ROS设置
[NeRF进展,语义驱动编辑] 浙江大学3DV国家重点实验室联合Google提出SINE,通过语义驱动NeRF编辑,完成多视角高质量、一致性的编辑操作
[NeRF进展,CLIP加NeRF,支持语言查询] 另一位创世大神Matthew新作提出LERF,在NERF中支持语言查询,ChatGPT将可与3D交互?
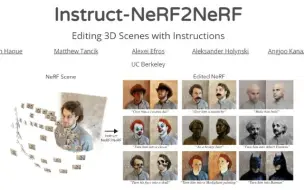
[NeRF进展,文本编辑NeRF] 创始大神Matthew+18岁大学生一作提出Instruct-NeRF2NeRF,使用文本指令进行3D场景的真实感编辑
[NeRF+Diffusion进展,单图重建3D] 韩国首尔大学提出DITTO-NeRF,使用文字或单图,通过前视角部分3D+迭代扩散填充,生成3D模型
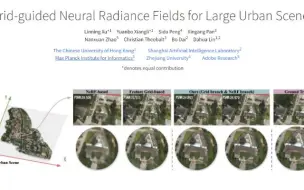
[NeRF进展,大型城市场景建模] 香港中文大学、浙江大学、马克斯普朗克等发布GridNeRF,高效建模大规模真实感城市3D场景
[NeRF,快速高质量重建] Tri-MipRF(PICO,清华,中科院),结合实时重建和抗锯齿高质量渲染的神经场方法,更小模型可达SOTA渲染质量和重建速度