V
主页
京东 11.11 红包
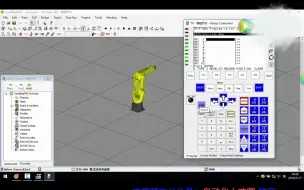
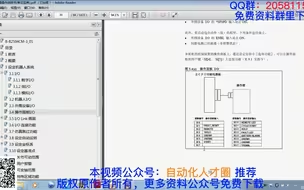
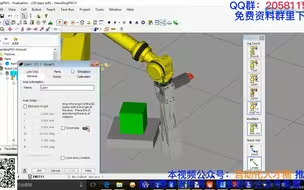
06 Roboguide 和机器人手册的配合使用a
发布人
发那科机器人基础教程
打开封面
下载高清视频
观看高清视频
视频下载器
07 发那科机器人通用io的分配
06 发那科机器人程序编辑方法
第02讲 KUKA机器人变量
32 发那科机器人位置寄存器的使用
41 发那科机器人在程序中使用注释
04 让发那科机器人动起来
31 发那科机器人寄存器的使用
64 发那科机器人输入中文注释
03-3KUKA机器人的使用安全
相机在机器人空间外的传送带跟踪-埃斯顿机器人
03 发那科Roboguide 创建一个弧焊项目
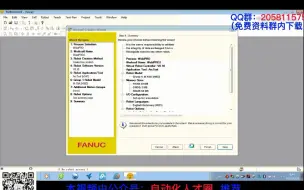
02 发那科仿真软件Roboguide的安装a
16_4KUKA机器人外部自动运行
08 发那科机器人专用io分配
04 发那科机器人创建一个程序并示教轨迹a
50 发那科机器人在程序中使用跳转语句JMP-LBL
62 发那科机器人与三菱q plc cclink设置
67 发那科机器人使用Jog面板快速切换坐标系
56 发那科机器人修改机器人关节运动范围
[13.6kg格斗机器人]记第一次13.6kg参赛
03-2KUKA机器人的使用安全-2
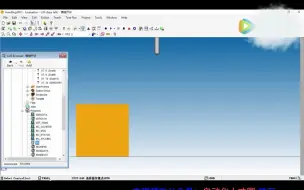
66 机器人仿真软3D操作方法
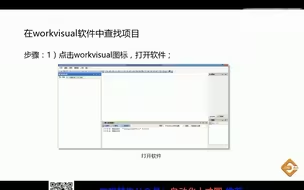
17_1KUKA机器人使用workvisual
04-2KUKA机器人示教器操作界面的功能与使用-1
09 发那科机器人PR寄存器软件操作示范
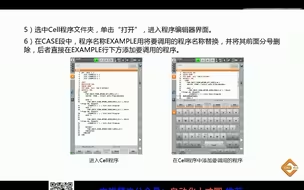
44 发那科机器人在程序中复制程序代码
03-1KUKA机器人的使用安全-1
第27讲 KUKA机器人配置自动模式
61 发那科机器人Cclink设置说明
47 发那科机器人在程序中使用撤销指令
11_1KUKA机器人局部子程序和全局子程序的使用
09 发那科机器人内部点的映射连接
49 发那科机器人在程序中使用分支语句if-select
20 发那科机器人的参考点的使用和标定
29 发那科机器人数字量io的使用
15发那科机器人用户坐标系的使用和三点法标定
30 发那科机器人模拟量io的使用
06-3KUKA机器人的首次运行
28 发那科机器人定位指令讲解
19 发那科机器人Iog坐标系的使用和标定方法