V
主页
京东 11.11 红包
47 发那科机器人在程序中使用撤销指令
发布人
发那科机器人编程教程
打开封面
下载高清视频
观看高清视频
视频下载器
50 发那科机器人在程序中使用跳转语句JMP-LBL
43 发那科机器人在程序中删除程序行
32 发那科机器人位置寄存器的使用
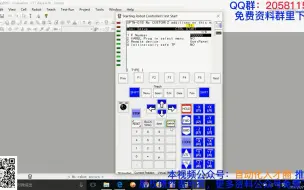
77 发那科机器人用运动控制制面板
35 发那科机器人修改机器人程序
52 发那科机器人备份机器人程序
36 发那科机器人在程序中使用io控制机器工具
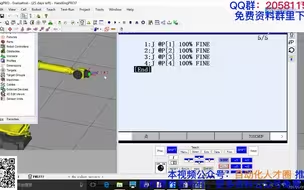
34 发那科机器人创建机器人程序
29 发那科机器人数字量io的使用
48 发那科机器人在程序中注释显示功能
62 发那科机器人与三菱q plc cclink设置
70 发那科机器人使用Target面板
25 发那科机器人运动指令讲解
45 发那科机器人在程序中重新编码编号
64 发那科机器人输入中文注释
24 发那科机器人程序内容和操作
30 发那科机器人模拟量io的使用
07 发那科机器人通用io的分配
67 发那科机器人使用Jog面板快速切换坐标系
74 发那科机器人用Path工具画运动曲线
42 发那科机器人在程序中新插入空行
72 发那科机器人用工人操作面板操作人物
13 发那科机器人手动输入法标定工具坐标系
01 发那科机器人公司及产品介绍
33 发那科机器人准备创建机器人程序
23 发那科机器人程序结构讲解
11 发那科机器人三点法标定工具坐标系定点的操作过程
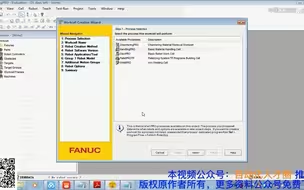
02 发那科仿真软件Roboguide的安装a
08 发那科机器人PR寄存器讲解
51 发那科机器人查看机器人当前坐标
60 发那科机器人试运行
79 发那科机器人用模型面板创建数模
73 发那科机器人查看机械手工具的作用范围
05 发那科机器人创建一个执行程序
66 机器人仿真软3D操作方法
200Smart PLC作为Modbus-TCP客户端程序怎么写?
第七章ABB机器人程序编写(三)
78 发那机器人科快速切换观察面
第27讲 KUKA机器人配置自动模式
第20讲 KUKA机器人调用当前位置变量