V
主页
京东 11.11 红包
08 发那科机器人专用io分配
发布人
发那科机器人编程基础教程
打开封面
下载高清视频
观看高清视频
视频下载器
56 发那科机器人修改机器人关节运动范围
57 发那科机器人修改机器人的负重配置
76 发那科机器人用位置编辑器编辑点坐标
61 发那科机器人Cclink设置说明
53 发那科机器人恢复机器人程序
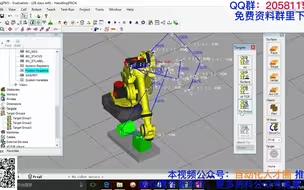
66 机器人仿真软3D操作方法
59 发那科机器人的基本设置
16_4KUKA机器人外部自动运行
29 发那科机器人数字量io的使用
32 发那科机器人位置寄存器的使用
28 发那科机器人定位指令讲解
72 发那科机器人用工人操作面板操作人物
09 发那科机器人内部点的映射连接
47 发那科机器人在程序中使用撤销指令
01 发那科机器人公司及产品介绍
54 发那科机器人修改机器人当前时间日期
65 发那科机器人示教器简易画面切换
第20讲 KUKA机器人调用当前位置变量
60 发那科机器人试运行
45 发那科机器人在程序中重新编码编号
25 发那科机器人运动指令讲解
第七章ABB机器人程序编写(三)
FTC into the deep 单车练习
77 发那科机器人用运动控制制面板
36 发那科机器人在程序中使用io控制机器工具
S7-1200 使用分配列表
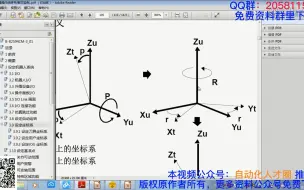
10 发那科机器人6个坐标系介绍
第02讲 KUKA机器人变量
79 发那科机器人用模型面板创建数模
70 发那科机器人使用Target面板
11 发那科机器人三点法标定工具坐标系定点的操作过程
26 发那科机器人的位置数据#工业机器人
这样的仿真机器人多少钱买🥹
27 发那科机器人运行速度讲解
37 发那科机器人在程序中使用io链接plc
19 发那科机器人Iog坐标系的使用和标定方法
71 发那科机器人用标签在对象上加注释
69 发那科机器人使用Move To面板快速定位
05 发那科机器人创建一个搬运项目a
16 发那科机器人用户坐标系的使用 四点法标定a