V
主页
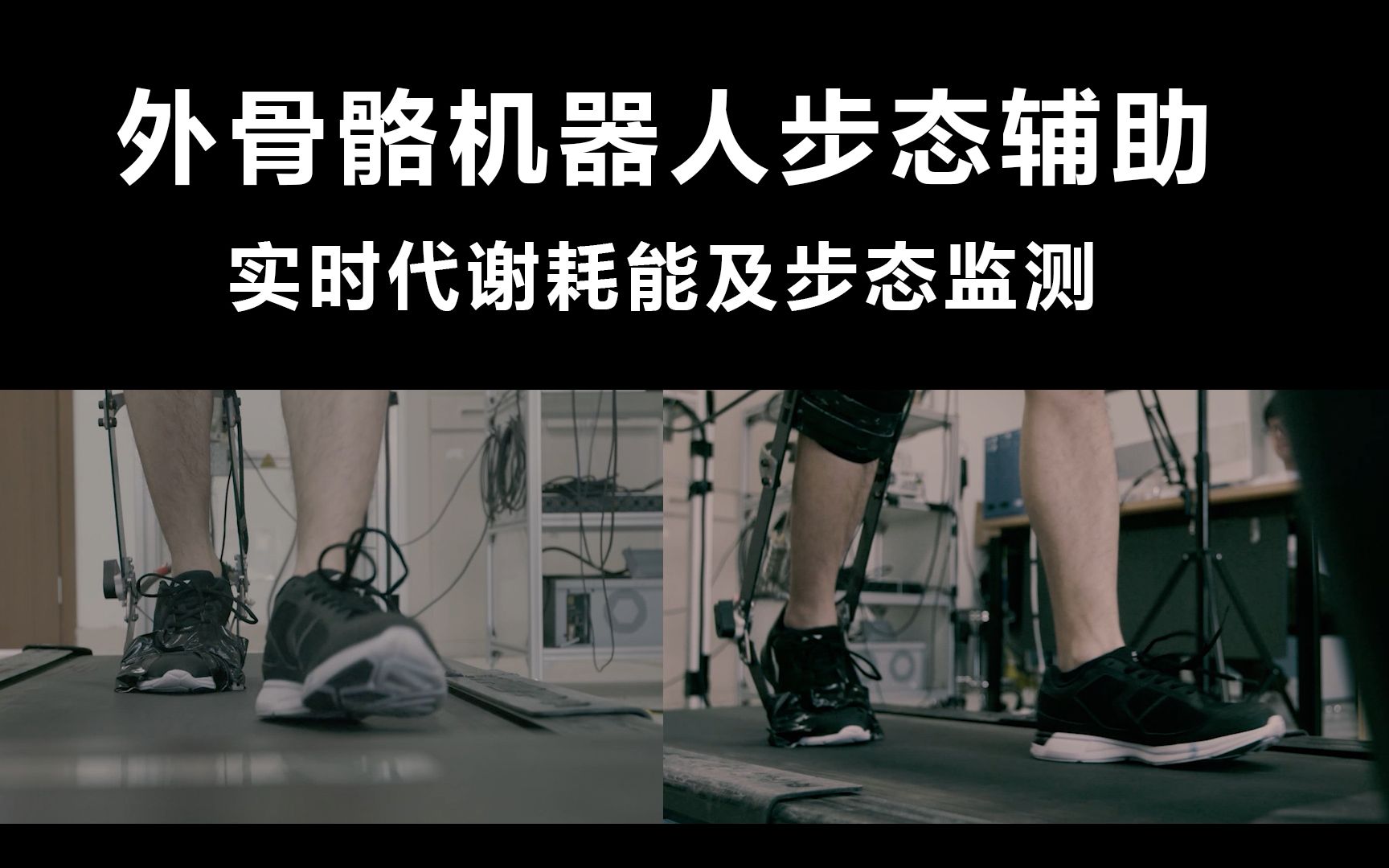
外骨骼机器人步态辅助实时代谢消耗及步态监测-南开大学
发布人
外骨骼机器人步态辅助实时代谢消耗及步态监测-南开大学 南开大学人工智能学院人机交互步态实验室主要致力于优化人机物理交互,提升运动辅助、康复机器人下肢相关系统的性能。并着力于医疗康复机器人、人体动力学、步态分析等延申领域的研究。 实验室选用NOKOV光学动作捕捉系统,并结合跑台、肌电、惯导、心肺功能仪、外骨骼等设备及仪器打造完整的人机交互步态分析平台。 获取更多内容,欢迎微信搜索关注公众号:NOKOV度量动作捕捉
打开封面
下载高清视频
观看高清视频
视频下载器
位姿定位数据在自动化领域中如何获取?看清华、北理工、北航、浙大、哈工大、上海交大等高校研究实例
【人类物理外挂】-南科大外骨骼机器人实验室
【动作捕捉】人体运动分析与步态分析直播Demo演示
三维步态分析系统—泰山智慧实验室
生机电一体化穿戴式机器人的研发(转自新华网)
【动作捕捉经典案例】NOKOV动作捕捉用于人体步态分析与动力假肢研究
双腿瘫痪女生穿外骨骼去万圣节,被误认为是机器人
无人机-无人车空地协同控制系统 中科院自动化所
Science Robotics 北大刘珂老师分享顶刊经验 软体机器人成果及研究过程 - 机器人学术年会顶刊论坛
IEEE RAL:背部外骨骼 高度兼容人体躯干运动
基于传感器的机器人系统运动控制
动作捕捉系统在步态分析中的应用——NOKOV小讲堂
空地协同/无人机/无人车在巡检机器人中的应用-武汉科技大学
使用增强现实AR-触觉混合人机交互界面的人机协作互补新框架
央视总台《新闻1+1》:进博会现场,白岩松老师体验「傲鲨智能可穿戴外骨骼机器人」助力搬运不伤腰,未来养老、护理等场景中,让生活更便捷。
帮助截瘫患者 | 站立行走的 | 外骨骼机器人 WalkON | 人工智能机器人
基于视觉识别的农业采摘机器人
坐标系转换如何通过动作捕捉系统操作——NOKOV小讲堂
仿生四足机器人步态规划研究-哈尔滨工业大学郑州研究院
萌娃无法行走,外骨骼陪伴每日练习
外骨骼机器人残疾人的新希望——跟凯凯一起学
【iClone实时动捕】AGI Mocap摄像头动作捕捉 踢腿拳击动作 Character Creator CC4实时视频动捕 游戏出脚勾拳肘击直拳
【动作捕捉经典案例】四足仿生机器人步态优化
无人车集群平台高度还原牧羊场景-北京理工大学方浩教授团队
机器狗的步态分析 动作捕捉集成三维测力平台—南京理工大学机械工程学院
增强现实辅助遥控操作
北理工成果登央视!实现半机械昆虫飞行控制,成功率可达89%
未知复杂环境的无人机自主目标搜寻 四川大学电信学院杨鑫松老师团队
增强现实AR-触觉人机交互界面已应用于超声扫描机器人!《方斌对话》直播首邀外籍教授,三人精彩共话人机协同操作!
多无人机协同控制-河北工业大学
RA-L/ICRA 2024:使用触觉增强的手持物体姿态跟踪系统
【本地AI动画】无需上传云端,仅使用本地显卡完成视频到3D动画实时映射
仿生壁虎机器人-武汉理工大学交通物流工程学院梅杰老师
中科院自动化所-群体智能研究详解
冰雪运动科学实验室-东北师范大学体育学院
协作机器人遥操作 - 大阪大学万伟伟老师团队最新成果
四元数和欧拉角如何通过动作捕捉系统输出——NOKOV小讲堂
人机交互遥操作:力反馈血管介入手术机器人
【视觉动捕】2024 Look Ma, no markers Holistic performance capture without the hassle
丢点问题如何通过动作捕捉软件解决——NOKOV小讲堂