V
主页
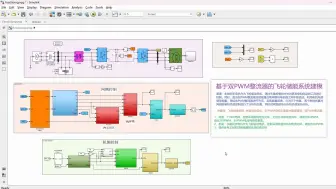
基于matlab建模FOC观测器采用龙贝格观测器+PLL进行无传感器控制(建议二倍速观看)
发布人
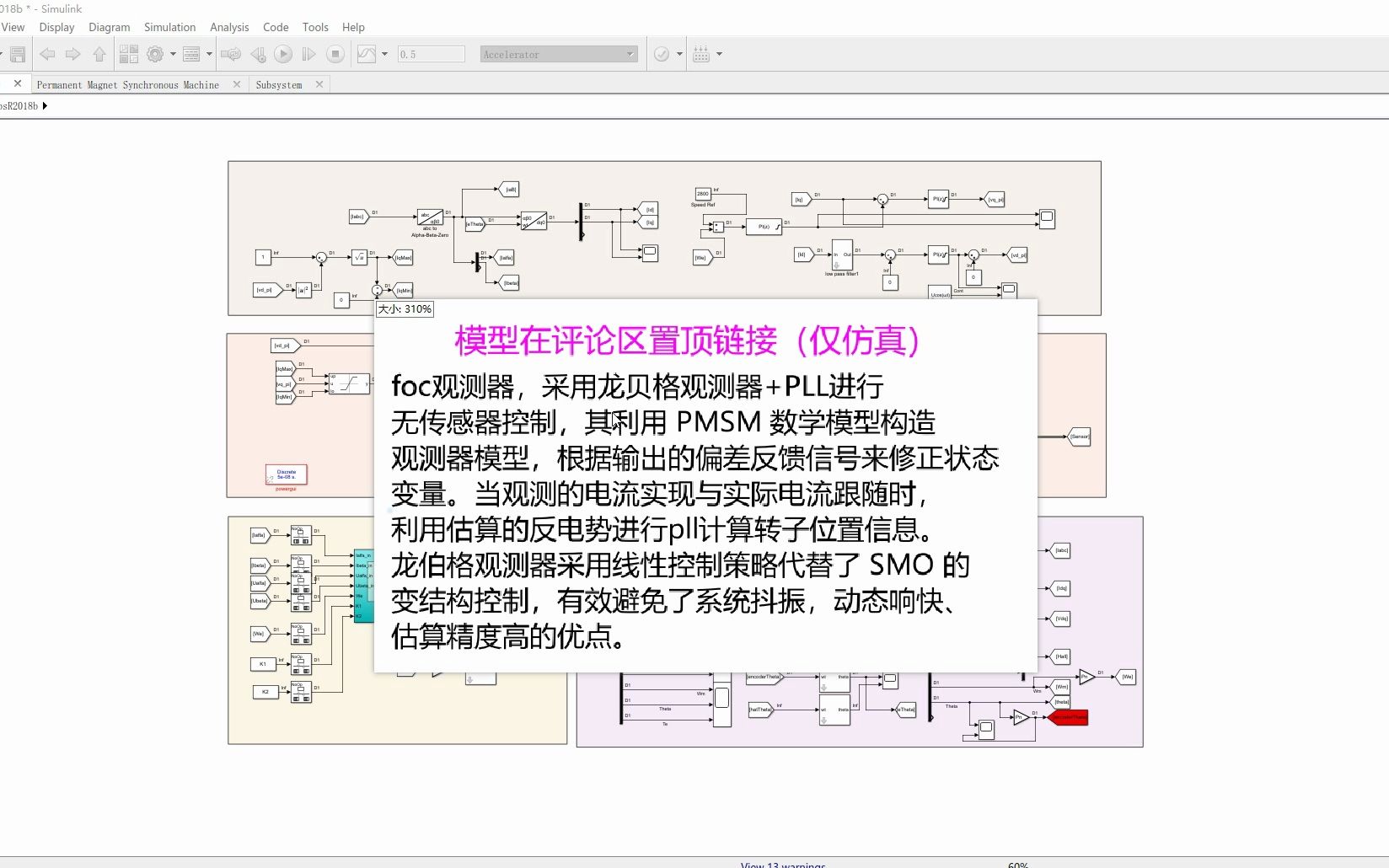
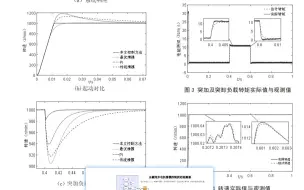
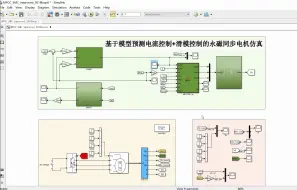
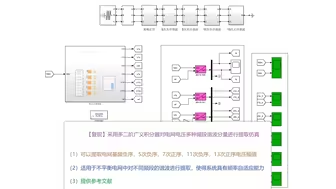
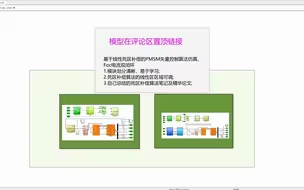
foc观测器,采用龙贝格观测器+PLL进行 无传感器控制,其利用 PMSM 数学模型构造 观测器模型,根据输出的偏差反馈信号来修正状态 变量。当观测的电流实现与实际电流跟随时, 利用估算的反电势进行pll计算转子位置信息。 龙伯格观测器采用线性控制策略代替了 SMO 的 变结构控制,有效避免了系统抖振,动态响快、 估算精度高的优点。
打开封面
下载高清视频
观看高清视频
视频下载器
基于滑模观测器SMO无位置传感器控制的PMSM模型
电机非线性磁链观测器+PLL 位置观测器Matlab仿真
Basics of Closed/Open-Loop Fractional Frequency Synthesis--Sudhakar Pamart(UCLA)
STM32电机库无感代码注释无传感器版本龙贝格观测三电阻双AD采样前馈控制弱磁控制斜坡启动
光储充+三相并网交直流系统(一)(带电池负载) 基于Matlab/simulink光储充交直流并网仿真(光伏储能充电桩交直流系统)可孤岛运行可并网运行
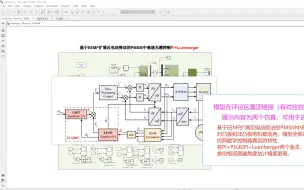
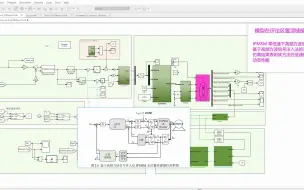
基于EEMF扩展反电动势法的PMSM中高速无感控制PI+PLL和PI+Luenberger龙伯格观测器仿真
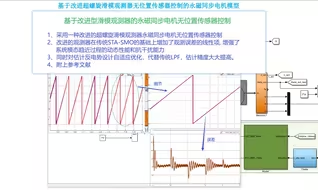
基于改进超螺旋滑模观测器的永磁同步电机无位置传感器控制
基于非线性干扰观测器的机械臂自适应反演滑模控制
【MPC】二自由度机械臂模型预测控制MATLAB 带参考文献
Ultra-Low-Power-DTC-Based-Fractional-N-Digital-PLL-Techniques---Kenichi Okada
基于自抗扰(ADRC)控制和eso扩张状态观测器永磁同步电机无位置传感器仿真
【EI期刊控制复现】基于非线性干扰观测器(NDOB)的滑模控制(SMC)Boost变换器
感应电机无速度传感器FOC控制异步电机无速度传感器矢量控制
【复现】光伏并网逆变器接入弱电网的序阻抗建模扫频法与稳定性分析
永磁同步电机IPMSM高频方波信号注入法的无位置传感器控制
感应电机有速度传感器FOC控制异步电机有速度传感器矢量控制
基于滑膜控制扰动观测器的永磁同步电机模型传统滑模控制器最优滑模控制器改进补偿滑膜控制器比较
永磁同步电机模型预测电流控制双矢量改进(电流环)+滑模控制(速度环,新型趋近律与扰动观测器结合)
Low-Spur-PLL-Architectures-and-Techniques---Mike Shuo Wei(USC)
【复现】电压型虚拟同步发电机接入弱电网的序阻抗建模扫频法与稳定性分析
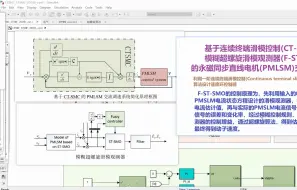
基于连续终端滑模控制(CT-SMC)和 模糊超螺旋滑模观测器(F-ST-SMO)的永磁同步直线电机(PMLSM)交流调速系统
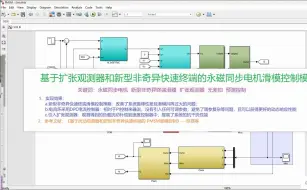
基于扩张观测器和新型非奇异快速终端滑模的永磁同步电机无差拍预测控制模型
全桥LLC参数计算设计书(Mathcad)(含变压器开关管等器件选型)
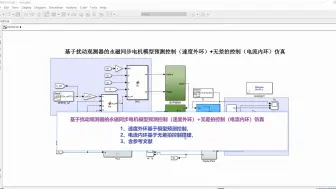
基于降阶龙伯格扰动观测器的永磁同步电机模型预测控制(速度外环)+无差拍控制(电流内环)仿真
同步电机死区补偿改善电流波形自适应补偿
基于DSP28069的30kw三相PFC充电桩T型三相维也纳原理图及代码(锁相环采用先进正负序分离含中点平衡控制PWM控制)
单相光伏储能并网PQ控制离网恒压恒频控制并离网切换含笔记和建模资料
Lecture-3、Circuit Noise Analysis & Representation-----Behzad Razavi(UCLA)
【复现】采用多二阶广义积分器对电网电压多种频段谐波分量进行提取仿真
【网盘自取】锁相环理论知识分享
车辆稳定性相平面Matlab程序绘制(含说明文件和参考资料)
含线性死区补偿的PMSM矢量控制FOC算法双闭环仿真
基于双PWM整流器的飞轮储能系统建模
Subsampling-PLLs-For-Frequency-Synthesis-Phase-Modulation--IMEC(Nereo-Markulic)
Lecture 1、Noise General Concepts----Behzad Razavi(UCLA)
关于恒功率负载下的Buck变换器建模与控制 状态反馈控制
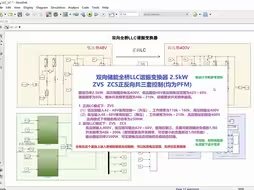
双向储能全桥LLC谐振变换器软开关ZVS ZCS正反向共三套控制(均为PFM)
基于内环有限集模型预测(FCS-MPC)+外环滑模控制+龙伯格观测器的永磁同步电机研究
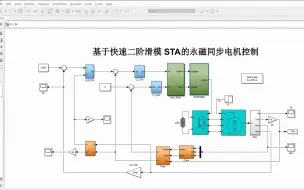
基于快速二阶滑模STA与扰动观测器的永磁同步电机PMSM滑模控制
High-Speed Serial Links Course (Dr. Sameh Ibrahim)---Serdes/Wireline/Equalizer